

Magneto-Responsive Shutter for On-Demand Droplet Manipulation
- PMID: 34693657
- PMCID: PMC8655205
- DOI: 10.1002/advs.202103182
Magneto-Responsive Shutter for On-Demand Droplet Manipulation
Abstract
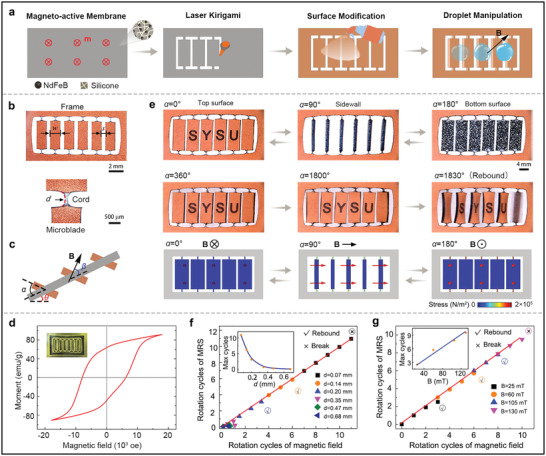
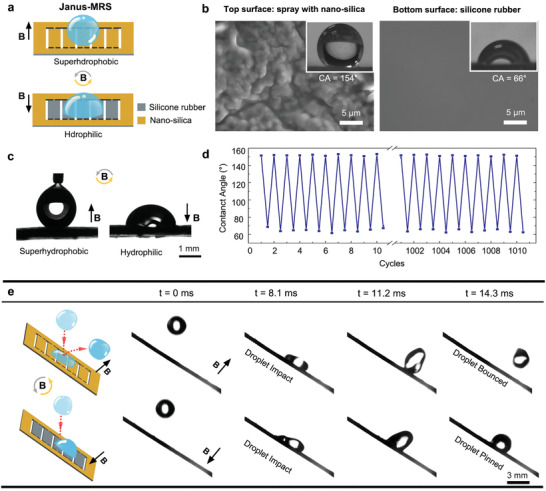
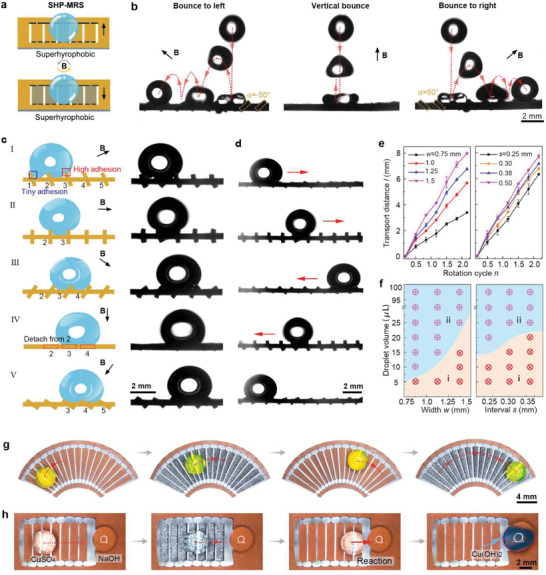
Magnetically responsive structured surfaces enabling multifunctional droplet manipulation are of significant interest in both scientific and engineering research. To realize magnetic actuation, current strategies generally employ well-designed microarrays of high-aspect-ratio structure components (e.g., microcilia, micropillars, and microplates) with incorporated magnetism to allow reversible bending deformation driven by magnets. However, such magneto-responsive microarray surfaces suffer from highly restricted deformation range and poor control precision under magnetic field, restraining their droplet manipulation capability. Herein, a novel magneto-responsive shutter (MRS) design composed of arrayed microblades connected to a frame is developed for on-demand droplet manipulation. The microblades can perform two dynamical transformation operations, including reversible swing and rotation, and significantly, the transformation can be precisely controlled over a large rotation range with the highest rotation angle up to 3960°. Functionalized MRSs based on the above design, including Janus-MRS, superhydrophobic MRS (SHP-MRS) and lubricant infused slippery MRS (LIS-MRS), can realize a wide range of droplet manipulations, ranging from switchable wettability, directional droplet bounce, droplet distribution, and droplet merging, to continuous droplet transport along either straight or curved paths. MRS provides a new paradigm of using swing/rotation topographic transformation to replace conventional bending deformation for highly efficient and on-demand multimode droplet manipulation under magnetic actuation.
Keywords: droplet transport; intelligent surfaces; laser kirigami; magnetic actuation; wettability.
© 2021 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


Similar articles
-
Magnetically Responsive Film Decorated with Microcilia for Robust and Controllable Manipulation of Droplets.ACS Appl Mater Interfaces. 2021 Jan 13;13(1):1754-1765. doi: 10.1021/acsami.0c16262. Epub 2021 Jan 3. ACS Appl Mater Interfaces. 2021. PMID: 33393309
-
Directional Manipulation of Drops and Solids on a Magneto-Responsive Slippery Surface.Langmuir. 2024 Feb 13;40(6):3105-3116. doi: 10.1021/acs.langmuir.3c03515. Epub 2024 Feb 2. Langmuir. 2024. PMID: 38306611
-
Multifunctional Janus Microplates Arrays Actuated by Magnetic Fields for Water/Light Switches and Bio-Inspired Assimilatory Coloration.Adv Mater. 2019 Apr;31(15):e1807507. doi: 10.1002/adma.201807507. Epub 2019 Feb 5. Adv Mater. 2019. PMID: 30721548
-
A Review of Smart Lubricant-Infused Surfaces for Droplet Manipulation.Nanomaterials (Basel). 2021 Mar 21;11(3):801. doi: 10.3390/nano11030801. Nanomaterials (Basel). 2021. PMID: 33801017 Free PMC article. Review.
-
Droplet Manipulation under a Magnetic Field: A Review.Biosensors (Basel). 2022 Mar 2;12(3):156. doi: 10.3390/bios12030156. Biosensors (Basel). 2022. PMID: 35323426 Free PMC article. Review.
Cited by
-
3D Printing Ultraflexible Magnetic Actuators via Screw Extrusion Method.Adv Sci (Weinh). 2022 May;9(16):e2200898. doi: 10.1002/advs.202200898. Epub 2022 Mar 28. Adv Sci (Weinh). 2022. PMID: 35347888 Free PMC article.
-
A review on control of droplet motion based on wettability modulation: principles, design strategies, recent progress, and applications.Sci Technol Adv Mater. 2022 Sep 6;23(1):473-497. doi: 10.1080/14686996.2022.2116293. eCollection 2022. Sci Technol Adv Mater. 2022. PMID: 36105915 Free PMC article. Review.
-
Light-Responsive Materials in Droplet Manipulation for Biochemical Applications.Adv Mater. 2025 Jan;37(2):e2313935. doi: 10.1002/adma.202313935. Epub 2024 Mar 1. Adv Mater. 2025. PMID: 38379512 Free PMC article. Review.
-
Acoustofluidic Tweezers Integrated with Droplet Sensing Enable Multifunctional Closed-Loop Droplet Manipulation.Adv Sci (Weinh). 2025 Jan;12(1):e2409394. doi: 10.1002/advs.202409394. Epub 2024 Nov 11. Adv Sci (Weinh). 2025. PMID: 39527667 Free PMC article.
-
RETRACTED: Preparation and Analysis of Structured Color Janus Droplets Based on Microfluidic 3D Droplet Printing.Micromachines (Basel). 2023 Oct 7;14(10):1911. doi: 10.3390/mi14101911. Micromachines (Basel). 2023. Retraction in: Micromachines (Basel). 2024 Mar 28;15(4):451. doi: 10.3390/mi15040451. PMID: 37893348 Free PMC article. Retracted.
References
-
- Peng Y., He Y. X., Yang S., Ben S., Cao M. Y., Li K., Liu K. S., Jiang L., Adv. Funct. Mater. 2015, 25, 5967.
-
- Huang Y., Stogin B. B., Sun N., Wang J., Yang S., Wong T. S., Adv. Mater. 2017, 29, 1604641. - PubMed
-
- Cao M. Y., Ju J., Li K., Dou S. X., Liu K. S., Jiang L., Adv. Funct. Mater. 2014, 24, 3235.
-
- Da H. Y., Dong Z. C., Jiang L., Sci. Adv. 2020, 6, eabb5528. - PubMed
-
- Sun Q., Wang D., Li Y., Zhang J., Ye S., Cui J., Chen L., Wang Z., Butt H. J., Vollmer D., Deng X., Nat. Mater. 2019, 18, 936. - PubMed
Publication types
Grants and funding
- 51975597/National Natural Science Foundation of China
- 21872176/National Natural Science Foundation of China
- 22072185/National Natural Science Foundation of China
- 2019A1515011011/Natural Science Foundation of Guangdong Province
- 2017TQ04X674/Special Support Plan for High Level Talents in Guangdong Province
LinkOut - more resources
Full Text Sources
Other Literature Sources