

ROBOGait: A Mobile Robotic Platform for Human Gait Analysis in Clinical Environments
- PMID: 34695999
- PMCID: PMC8540656
- DOI: 10.3390/s21206786
ROBOGait: A Mobile Robotic Platform for Human Gait Analysis in Clinical Environments
Abstract
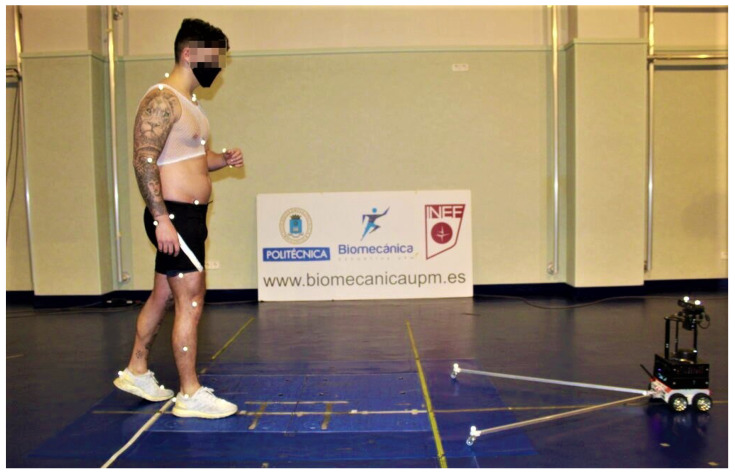
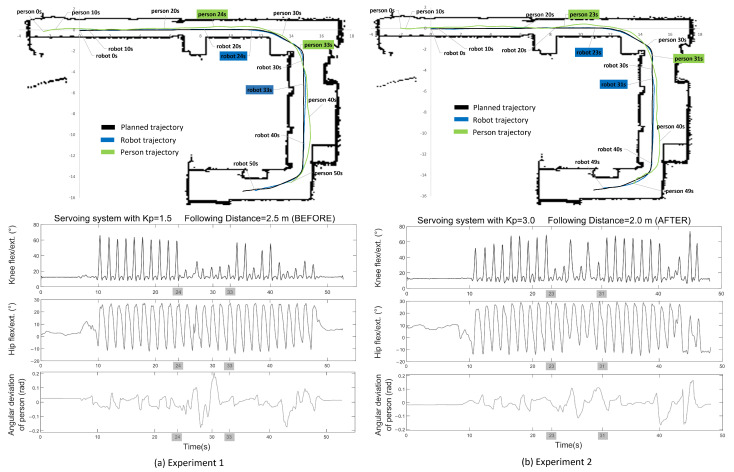
Mobile robotic platforms have made inroads in the rehabilitation area as gait assistance devices. They have rarely been used for human gait monitoring and analysis. The integration of mobile robots in this field offers the potential to develop multiple medical applications and achieve new discoveries. This study proposes the use of a mobile robotic platform based on depth cameras to perform the analysis of human gait in practical scenarios. The aim is to prove the validity of this robot and its applicability in clinical settings. The mechanical and software design of the system is presented, as well as the design of the controllers of the lane-keeping, person-following, and servoing systems. The accuracy of the system for the evaluation of joint kinematics and the main gait descriptors was validated by comparison with a Vicon-certified system. Some tests were performed in practical scenarios, where the effectiveness of the lane-keeping algorithm was evaluated. Clinical tests with patients with multiple sclerosis gave an initial impression of the applicability of the instrument in patients with abnormal walking patterns. The results demonstrate that the system can perform gait analysis with high accuracy. In the curved sections of the paths, the knee joint is affected by occlusion and the deviation of the person in the camera reference system. This issue was greatly improved by adjusting the servoing system and the following distance. The control strategy of this robot was specifically designed for the analysis of human gait from the frontal part of the participant, which allows one to capture the gait properly and represents one of the major contributions of this study in clinical practice.
Keywords: clinical environments; human gait analysis; markerless system; mobile robotic platforms; motion capture; multiple sclerosis.
Conflict of interest statement
The authors declare no conflict of interest.
Figures









References
-
- Liparoti M., Della Corte M., Rucco R., Sorrentino P., Sparaco M., Capuano R., Minino R., Lavorgna L., Agosti V., Sorrentino G., et al. Gait abnormalities in minimally disabled people with Multiple Sclerosis: A 3D-motion analysis study. Mult. Scler. Relat. Disord. 2019;29:100–107. doi: 10.1016/j.msard.2019.01.028. - DOI - PubMed
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
