

Robotic Railway Multi-Sensing and Profiling Unit Based on Artificial Intelligence and Data Fusion
- PMID: 34696089
- PMCID: PMC8538696
- DOI: 10.3390/s21206876
Robotic Railway Multi-Sensing and Profiling Unit Based on Artificial Intelligence and Data Fusion
Abstract
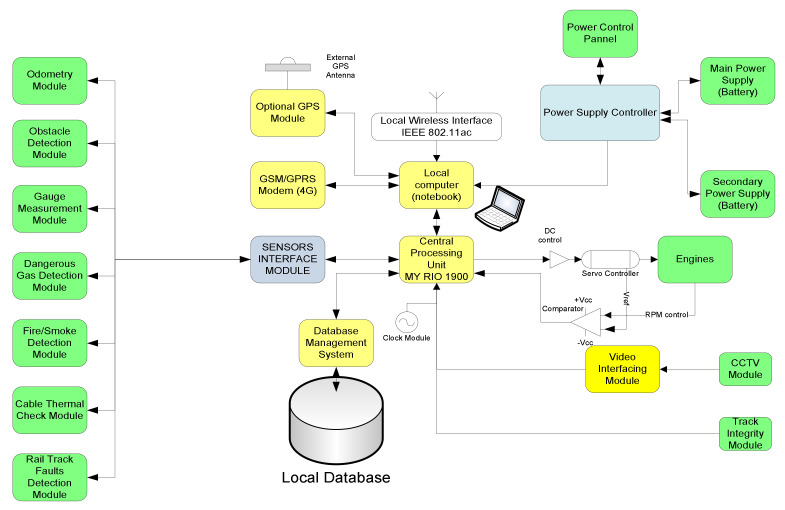
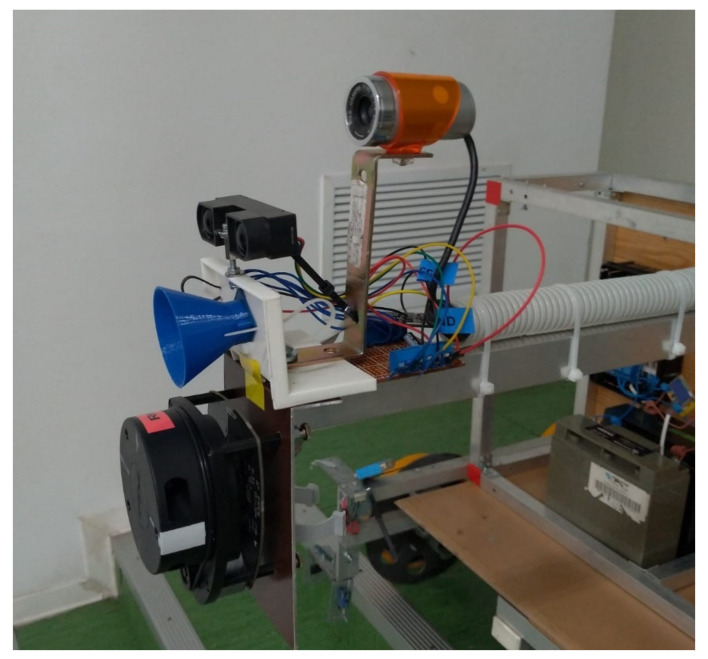
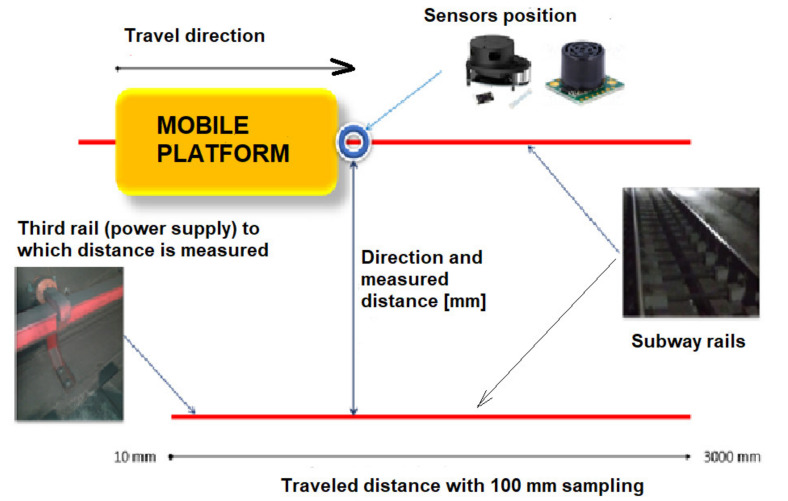
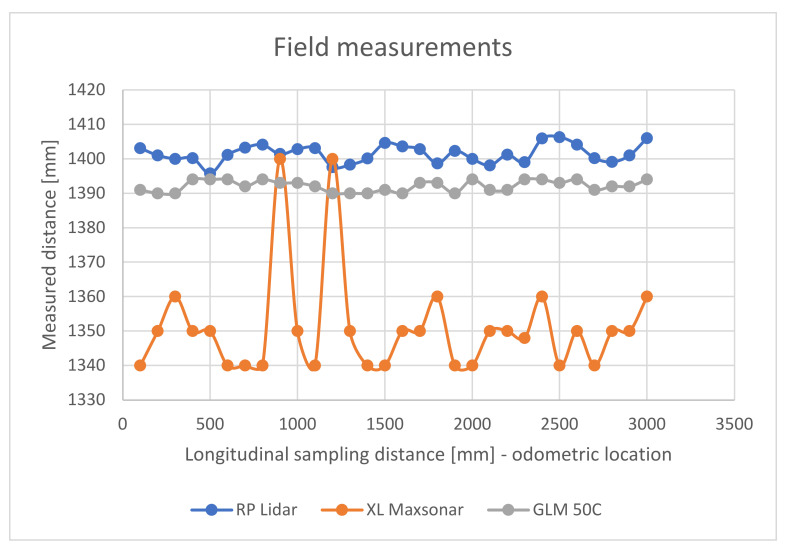
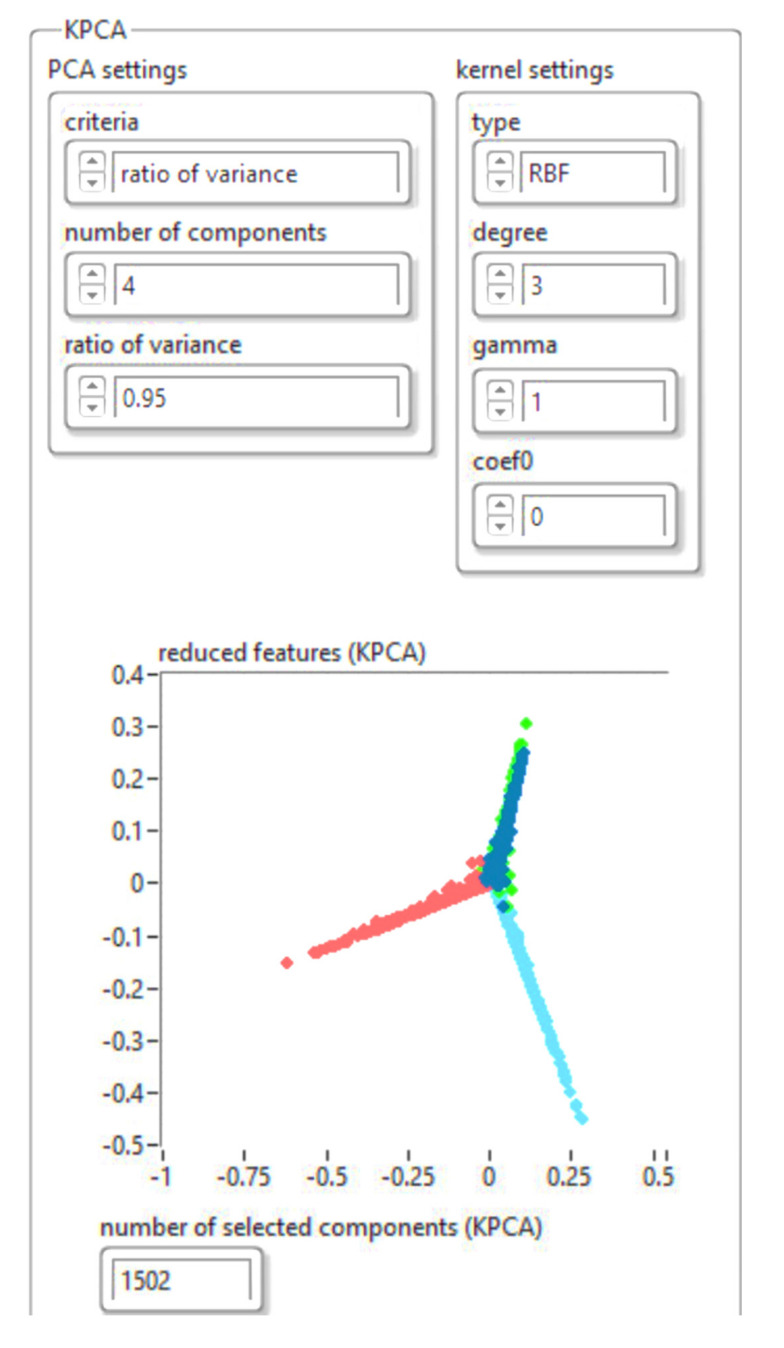
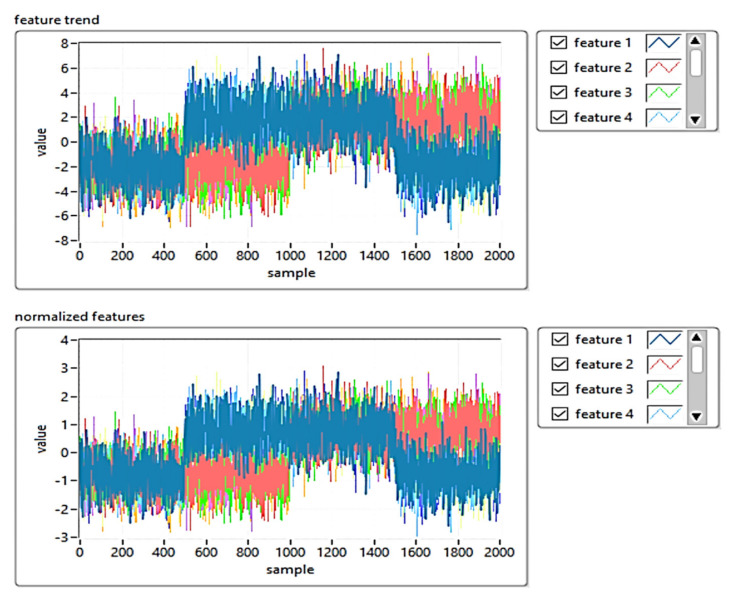
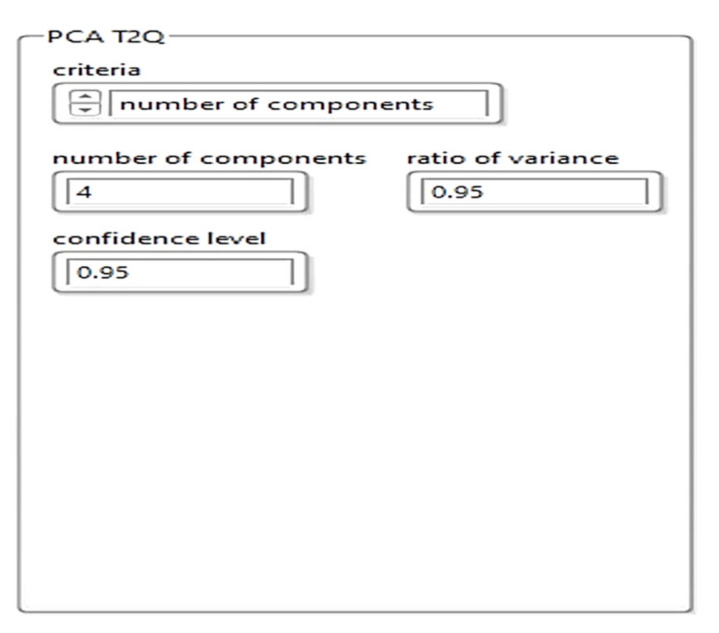
This article presents the research and results of field tests and simulations regarding an autonomous/robotic railway vehicle, designed to collect multiple information on safety and functional parameters of a surface railway and/or subway section, based on data fusion and machine learning. The maintenance of complex railways, or subway networks with long operating times is a difficult process and intensive resources consuming. The proposed solution delivers human operators in the fault management service and operations from the time-consuming task of railway inspection and measurements, by integrating several sensors and collecting most relevant information on railway, associated automation equipment and infrastructure on a single intelligent platform. The robotic cart integrates autonomy, remote sensing, artificial intelligence, and ability to detect even infrastructural anomalies. Moreover, via a future process of complex statistical filtering of data, it is foreseen that the solution might be configured to offer second-order information about infrastructure changes, such as land sliding, water flooding, or similar modifications. Results of simulations and field tests show the ability of the platform to integrate several fault management operations in a single process, useful in increasing railway capacity and resilience.
Keywords: data fusion; infrastructure failure detection; machine learning; multisensory platform; railway automation; statistical data filtering.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


References
-
- Fact Sheets on the European Union—2021. [(accessed on 22 July 2021)]. Available online: https://www.europarl.europa.eu/ftu/pdf/en/FTU_3.4.5.pdf.
-
- Fact Sheet | High Speed Rail Development Worldwide. [(accessed on 25 July 2021)]. Available online: https://www.eesi.org/papers/view/fact-sheet-high-speed-rail-development-....
-
- Odziemczyk W., Woźniak M. Analysis of railway track geometry measurement methods usability. Transp. Overv.-Przeglad Komun. 2018;2018:40–50. doi: 10.35117/A_ENG_18_08_05. - DOI
-
- Pan P., Hu H., Yang X., Blaabjerg F., Wang X., He Z. Impedance Measurement of Traction Network and Electric Train for Stability Analysis in High-Speed Railways. IEEE Trans. Power Electron. 2018;33:10086–10100. doi: 10.1109/TPEL.2018.2836660. - DOI
-
- Dolara A., Leva S. Calculation of Rail Internal Impedance by Using Finite Elements Methods and Complex Magnetic Permeability. Int. J. Veh. Technol. 2009;2009:1–10. doi: 10.1155/2009/505246. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
