

Operational Parameters for Sub-Nano Tesla Field Resolution of PHMR Sensors in Harsh Environments
- PMID: 34696103
- PMCID: PMC8539847
- DOI: 10.3390/s21206891
Operational Parameters for Sub-Nano Tesla Field Resolution of PHMR Sensors in Harsh Environments
Abstract
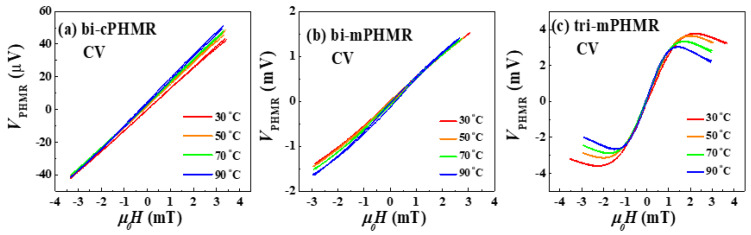
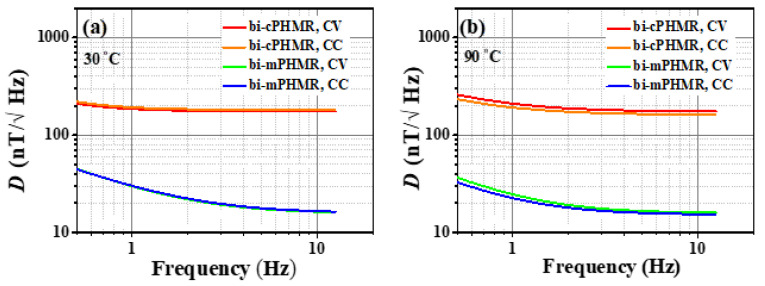
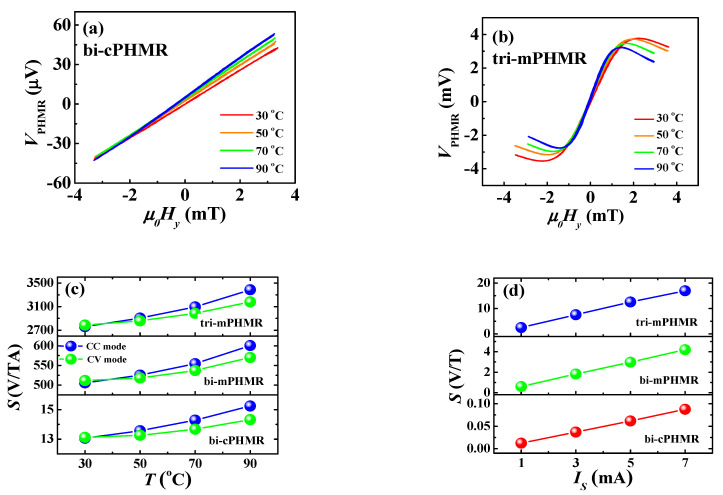
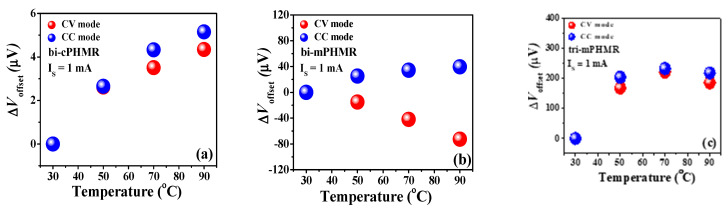
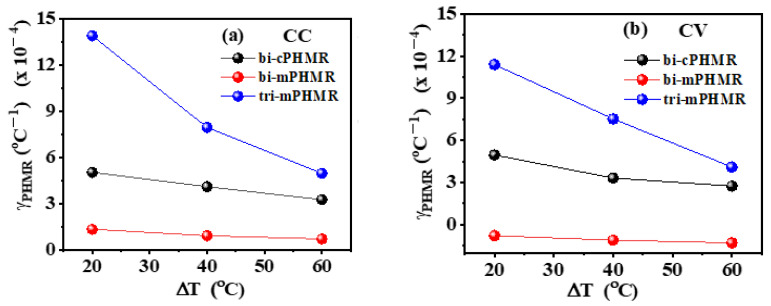
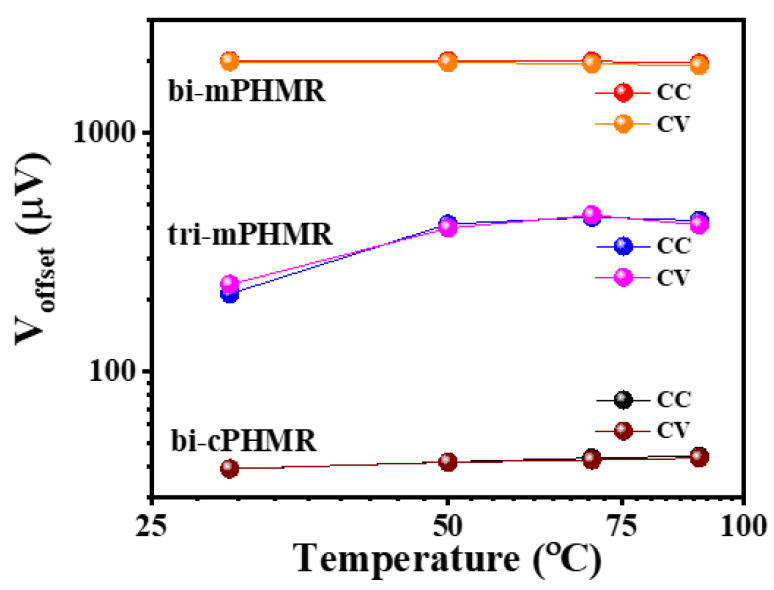
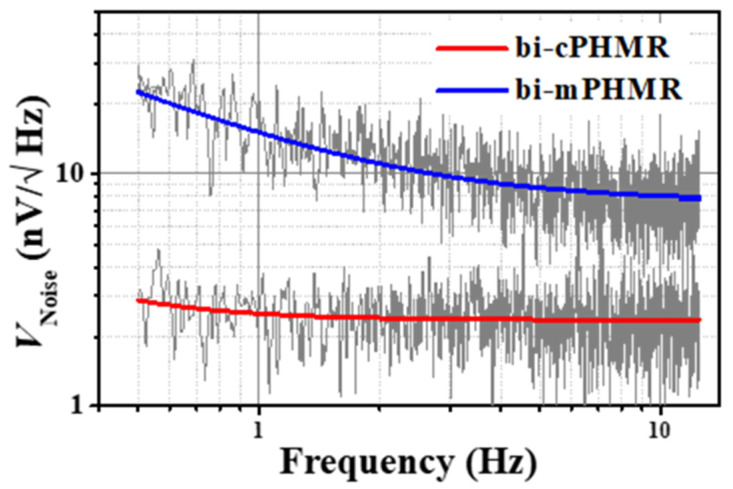
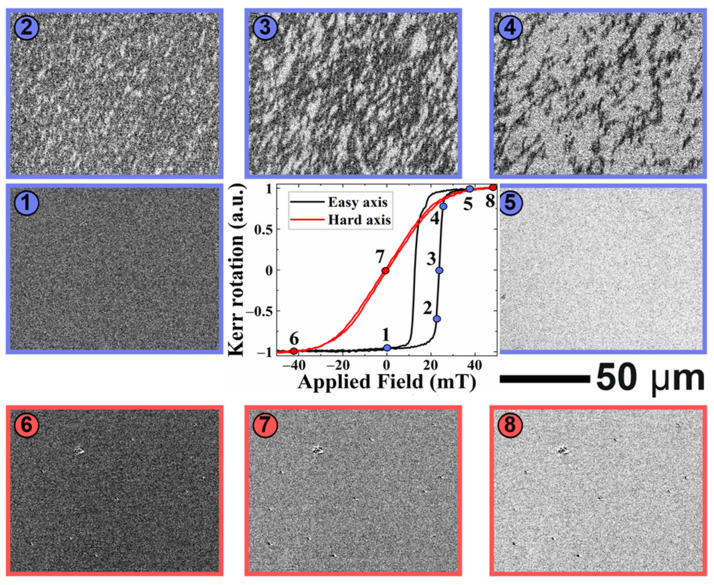
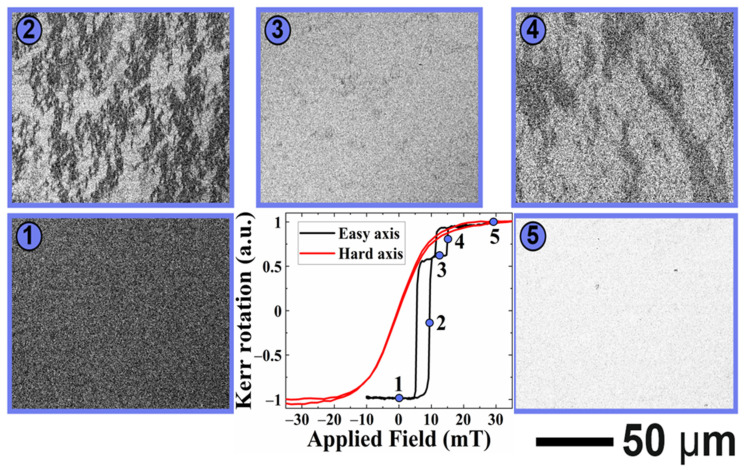
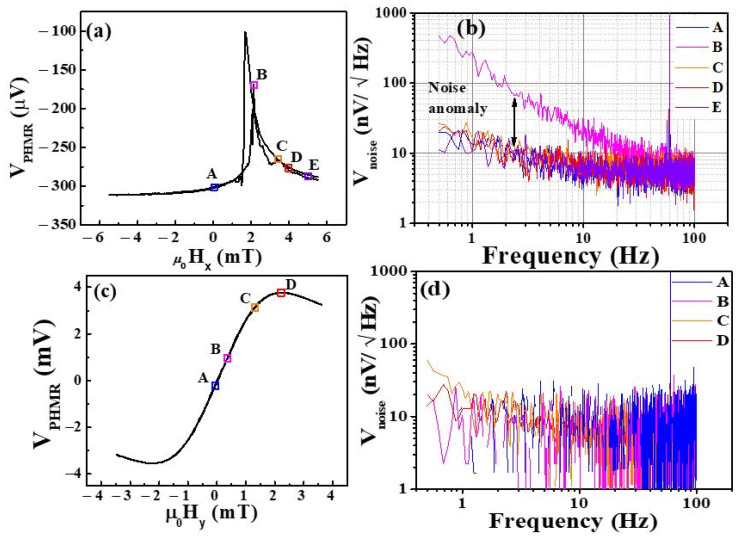
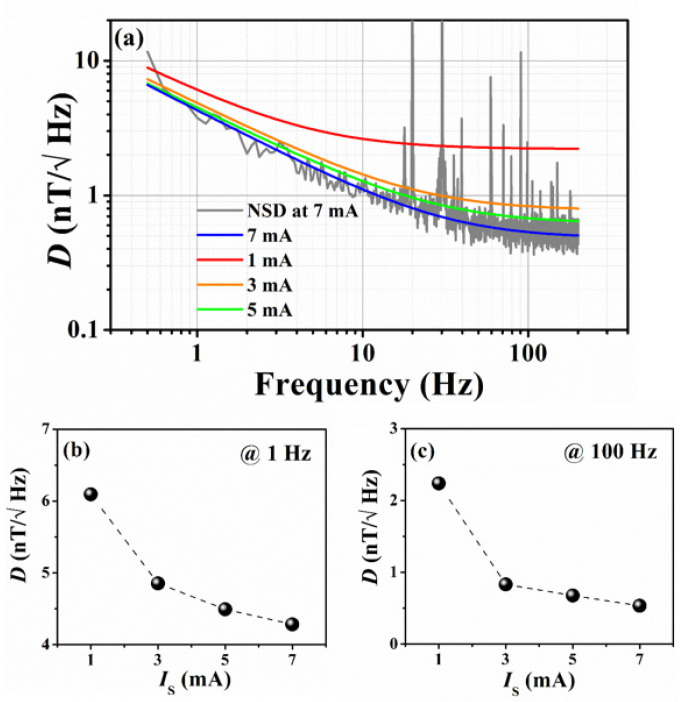
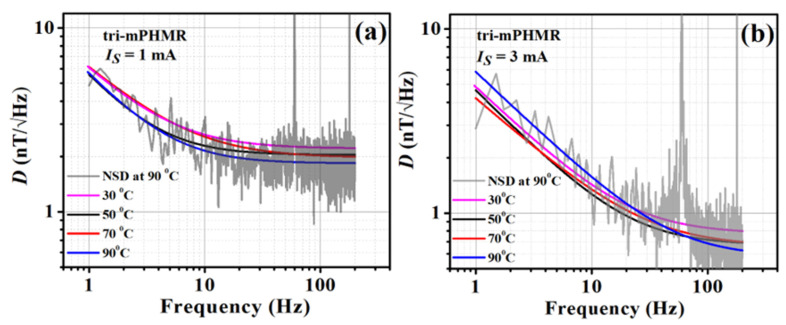
The resolution of planar-Hall magnetoresistive (PHMR) sensors was investigated in the frequency range from 0.5 Hz to 200 Hz in terms of its sensitivity, average noise level, and detectivity. Analysis of the sensor sensitivity and voltage noise response was performed by varying operational parameters such as sensor geometrical architectures, sensor configurations, sensing currents, and temperature. All the measurements of PHMR sensors were carried out under both constant current (CC) and constant voltage (CV) modes. In the present study, Barkhausen noise was revealed in 1/f noise component and found less significant in the PHMR sensor configuration. Under measured noise spectral density at optimized conditions, the best magnetic field detectivity was achieved better than 550 pT/√Hz at 100 Hz and close to 1.1 nT/√Hz at 10 Hz for a tri-layer multi-ring PHMR sensor in an unshielded environment. Furthermore, the promising feasibility and possible routes for further improvement of the sensor resolution are discussed.
Keywords: field detectivity; magnetoresistive sensors; planar-Hall magnetoresistance; sensitivity.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Makarov A., Windbacher T., Sverdlov V., Selberherr S. CMOS-compatible spintronic devices: A review. Semicond. Sci. Technol. 2016;31:11. doi: 10.1088/0268-1242/31/11/113006. - DOI
-
- Zhai J., Dong S., Xing Z., Li J., Viehland D. Geomagnetic sensor based on giant magnetoelectric effect. Appl. Phys. Lett. 2007;91:123513. doi: 10.1063/1.2789391. - DOI
-
- Zuo S., Heidari H., Farina D., Nazarpour K. Miniaturued magnetic sensors for implantable magnetomyography. Adv. Mater. Tech. 2020;5:2000185. doi: 10.1002/admt.202000185. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
