

Smoothness metrics for reaching performance after stroke. Part 1: which one to choose?
- PMID: 34702281
- PMCID: PMC8549250
- DOI: 10.1186/s12984-021-00949-6
Smoothness metrics for reaching performance after stroke. Part 1: which one to choose?
Abstract
Background: Smoothness is commonly used for measuring movement quality of the upper paretic limb during reaching tasks after stroke. Many different smoothness metrics have been used in stroke research, but a 'valid' metric has not been identified. A systematic review and subsequent rigorous analysis of smoothness metrics used in stroke research, in terms of their mathematical definitions and response to simulated perturbations, is needed to conclude whether they are valid for measuring smoothness. Our objective was to provide a recommendation for metrics that reflect smoothness after stroke based on: (1) a systematic review of smoothness metrics for reaching used in stroke research, (2) the mathematical description of the metrics, and (3) the response of metrics to simulated changes associated with smoothness deficits in the reaching profile.
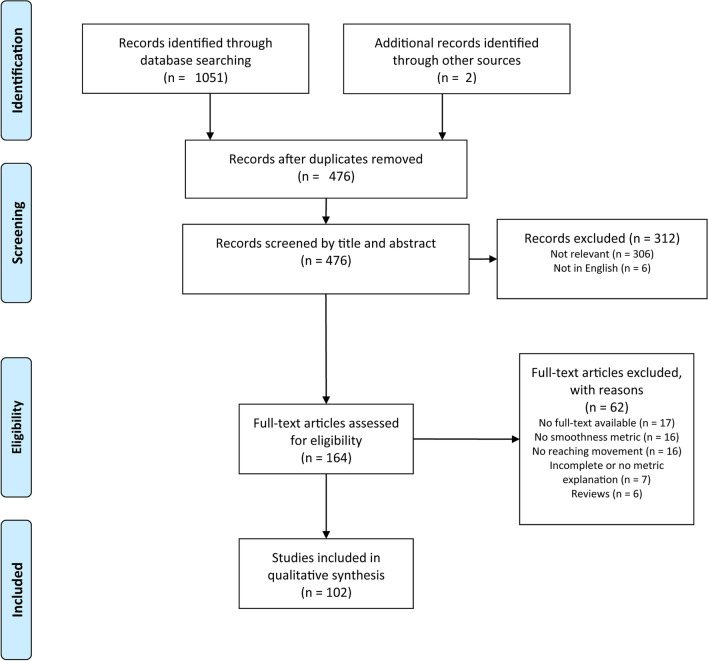
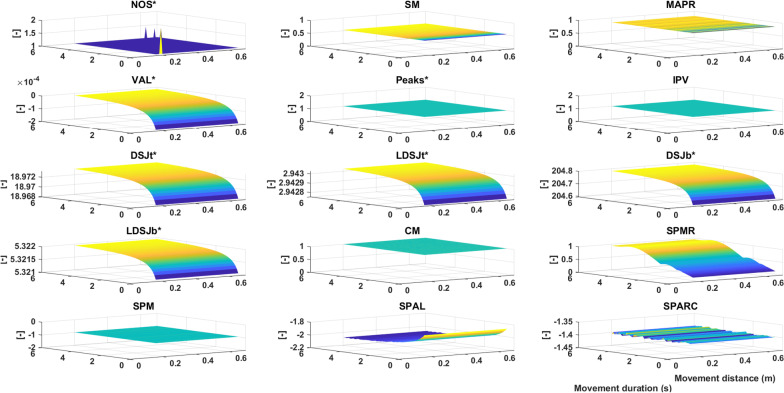
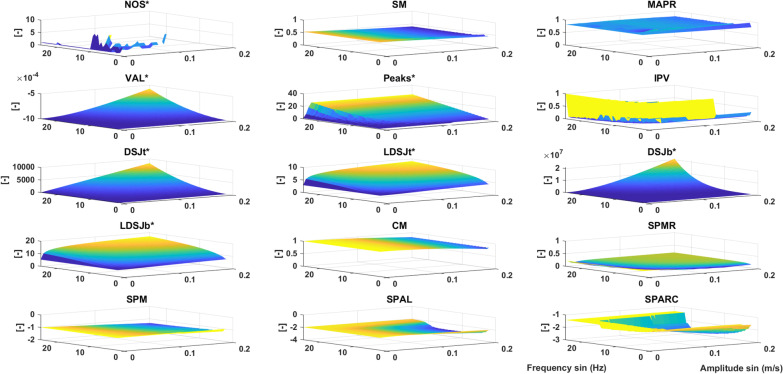
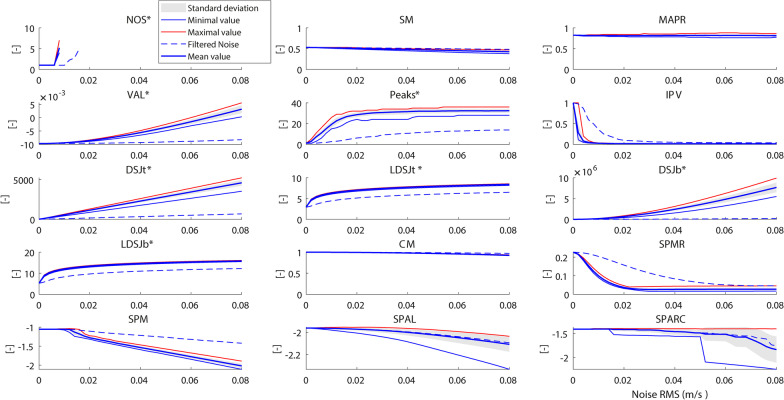
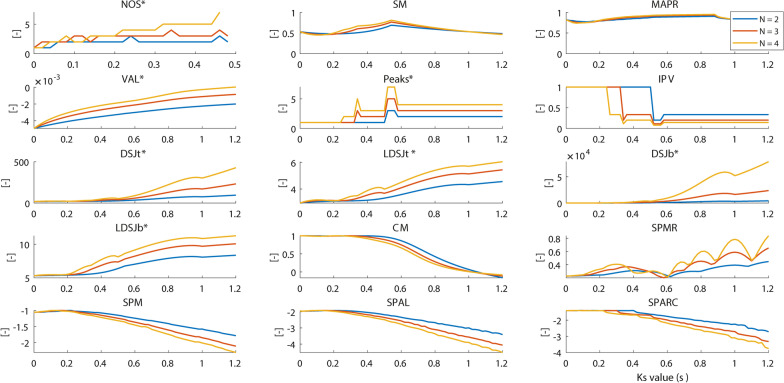
Methods: The systematic review was performed by screening electronic databases using combined keyword groups Stroke, Reaching and Smoothness. Subsequently, each metric identified was assessed with mathematical criteria regarding smoothness: (a) being dimensionless, (b) being reproducible, (c) being based on rate of change of position, and (d) not being a linear transform of other smoothness metrics. The resulting metrics were tested for their response to simulated changes in reaching using models of velocity profiles with varying reaching distances and durations, harmonic disturbances, noise, and sub-movements. Two reaching tasks were simulated; reach-to-point and reach-to-grasp. The metrics that responded as expected in all simulation analyses were considered to be valid.
Results: The systematic review identified 32 different smoothness metrics, 17 of which were excluded based on mathematical criteria, and 13 more as they did not respond as expected in all simulation analyses. Eventually, we found that, for reach-to-point and reach-to-grasp movements, only Spectral Arc Length (SPARC) was found to be a valid metric.
Conclusions: Based on this systematic review and simulation analyses, we recommend the use of SPARC as a valid smoothness metric in both reach-to-point and reach-to-grasp tasks of the upper limb after stroke. However, further research is needed to understand the time course of smoothness measured with SPARC for the upper limb early post stroke, preferably in longitudinal studies.
Keywords: Reaching; Review; Simulation analyses; Smoothness; Stroke.
© 2021. The Author(s).
Conflict of interest statement
The authors report no competing interests.
Figures
References
-
- Balasubramanian S, Wei R, Herman R, He J. Robot-measured performance metrics in stroke rehabilitation. Proc 2009 ICME Int Conf Complex Med Eng C 2009. 2009.
-
- Marini F, Hughes CML, Squeri V, Doglio L, Moretti P, Morasso P, et al. Robotic wrist training after stroke: adaptive modulation of assistance in pediatric rehabilitation. Rob Auton Syst. 2017;91:169–178. doi: 10.1016/j.robot.2017.01.006. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
