

Probabilistic early warning signals
- PMID: 34707843
- PMCID: PMC8525087
- DOI: 10.1002/ece3.8123
Probabilistic early warning signals
Abstract
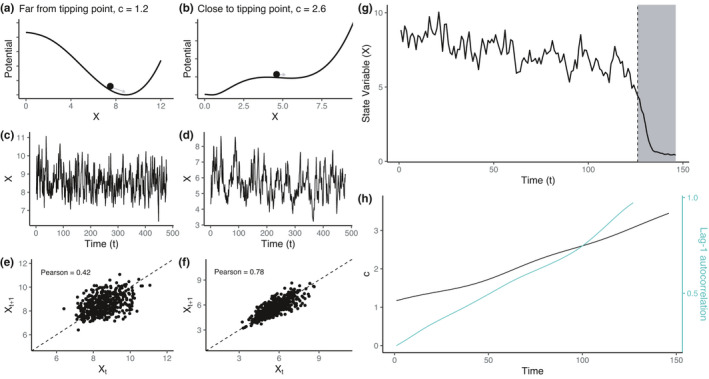
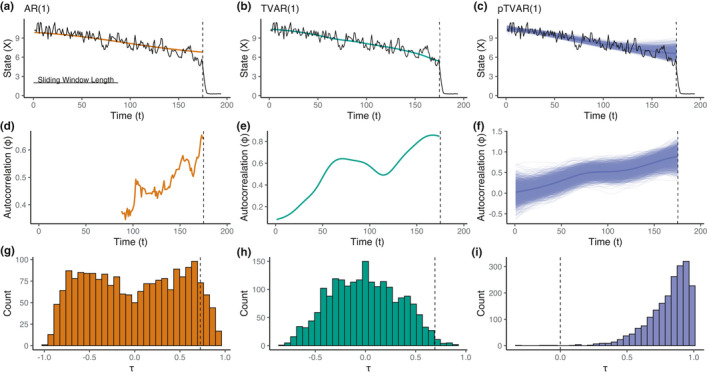
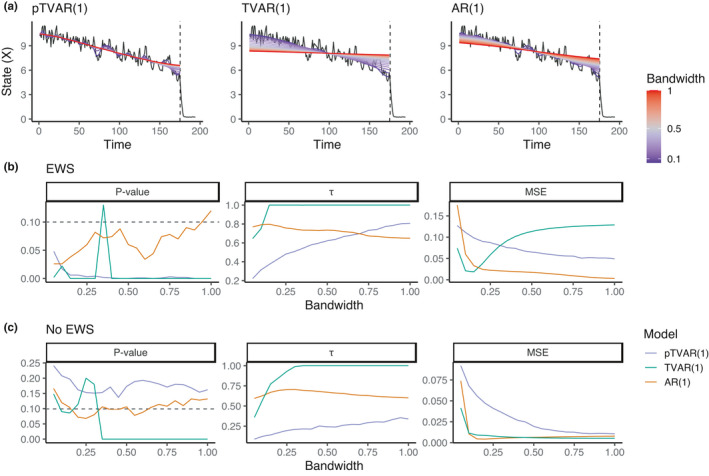
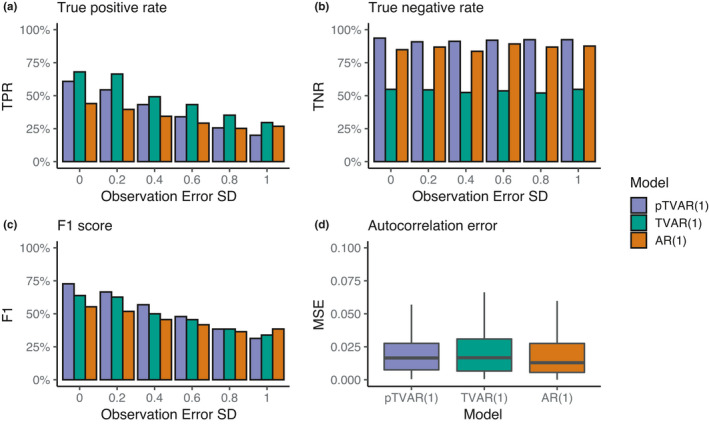
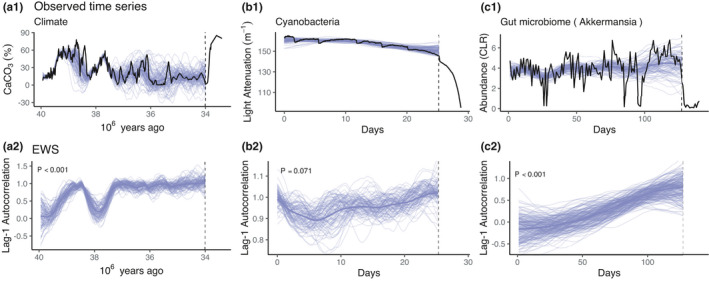
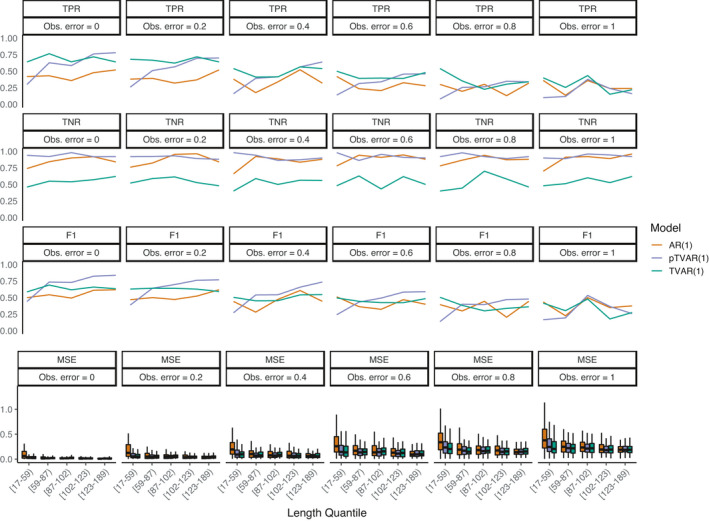
Ecological communities and other complex systems can undergo abrupt and long-lasting reorganization, a regime shift, when deterministic or stochastic factors bring them to the vicinity of a tipping point between alternative states. Such changes can be large and often arise unexpectedly. However, theoretical and experimental analyses have shown that changes in correlation structure, variance, and other standard indicators of biomass, abundance, or other descriptive variables are often observed prior to a state shift, providing early warnings of an anticipated transition. Natural systems manifest unknown mixtures of ecological and environmental processes, hampered by noise and limited observations. As data quality often cannot be improved, it is important to choose the best modeling tools available for the analysis.We investigate three autoregressive models and analyze their theoretical differences and practical performance. We formulate a novel probabilistic method for early warning signal detection and demonstrate performance improvements compared to nonprobabilistic alternatives based on simulation and publicly available experimental time series.The probabilistic formulation provides a novel approach to early warning signal detection and analysis, with enhanced robustness and treatment of uncertainties. In real experimental time series, the new probabilistic method produces results that are consistent with previously reported findings.Robustness to uncertainties is instrumental in the common scenario where mechanistic understanding of the complex system dynamics is not available. The probabilistic approach provides a new family of robust methods for early warning signal detection that can be naturally extended to incorporate variable modeling assumptions and prior knowledge.
Keywords: early warning signals; probabilistic programming.
© 2021 The Authors. Ecology and Evolution published by John Wiley & Sons Ltd.
Conflict of interest statement
All authors declared no conflict of interest.
Figures
References
-
- Auger‐Méthé, M. , Field, C. , Albertsen, C. M. , Derocher, A. E. , Lewis, M. A. , Jonsen, I. D. , & Mills Flemming, J. (2016). State‐space models’dirty little secrets: even simple linear gaussian models can have estimation problems. Scientific Reports, 6, 26677. 10.1038/srep26677 - DOI - PMC - PubMed
-
- Carpenter, S. R. , Cole, J. J. , Pace, M. L. , Batt, R. , Brock, W. A. , Cline, T. , Coloso, J. , Hodgson, J. R. , Kitchell, J. F. , Seekell, D. A. , Smith, L. , & Weidel, B. (2011). Early Warnings of Regime Shifts: A Whole‐Ecosystem Experiment. Science, 332, 1079–1082. 10.1126/science.1203672 - DOI - PubMed
LinkOut - more resources
Full Text Sources
Research Materials
