

Experimental Evaluation of Tactile Sensors for Compliant Robotic Hands
- PMID: 34708080
- PMCID: PMC8544026
- DOI: 10.3389/frobt.2021.704416
Experimental Evaluation of Tactile Sensors for Compliant Robotic Hands
Abstract
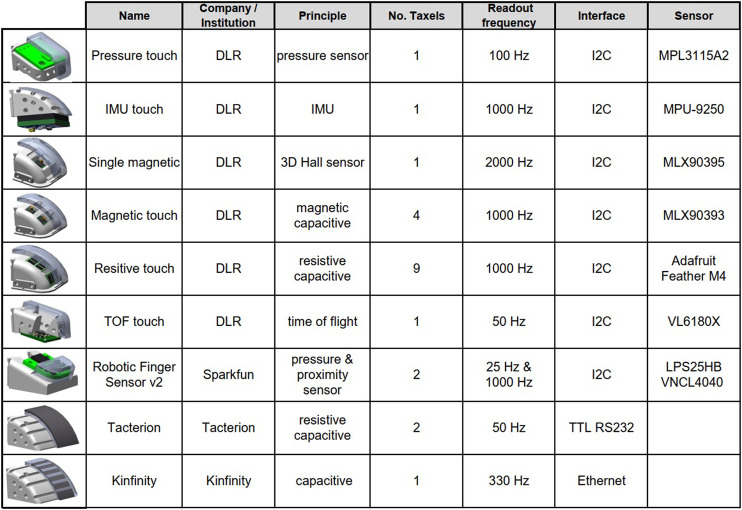
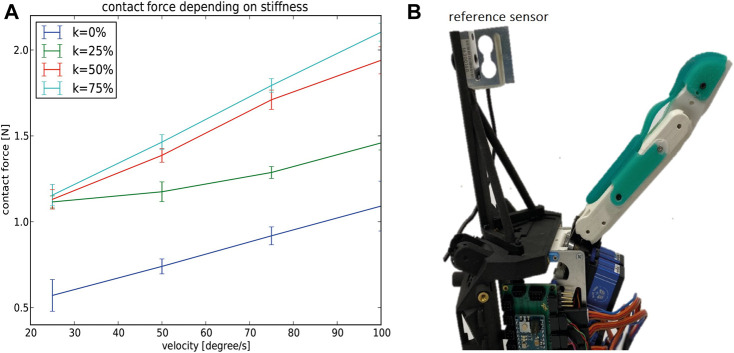
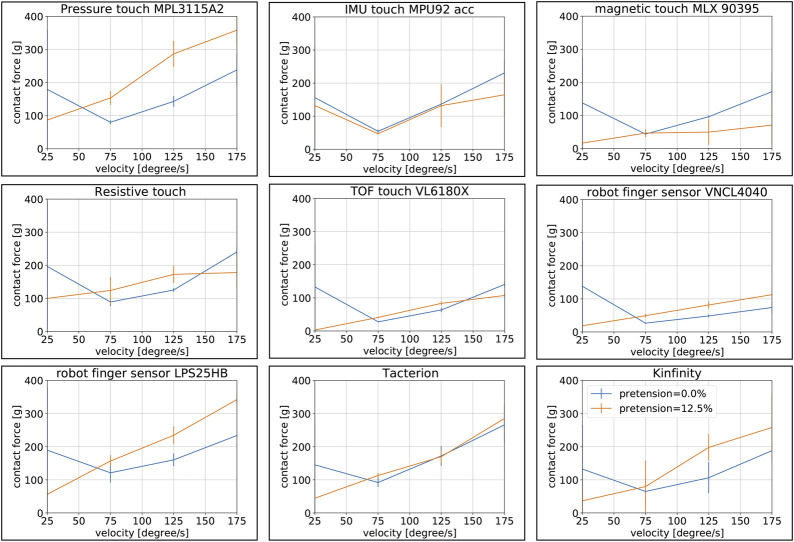
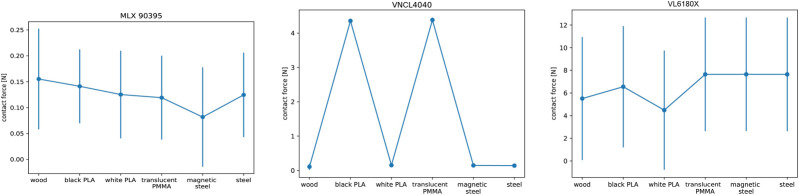
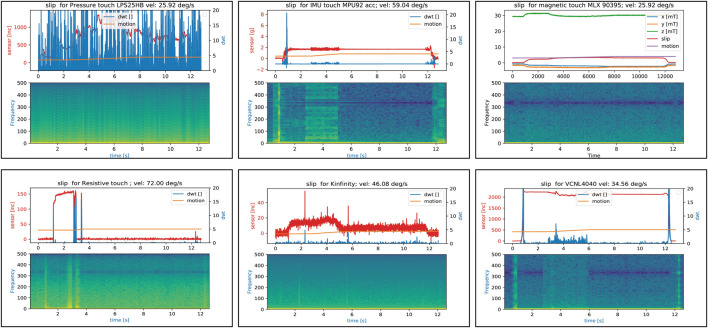
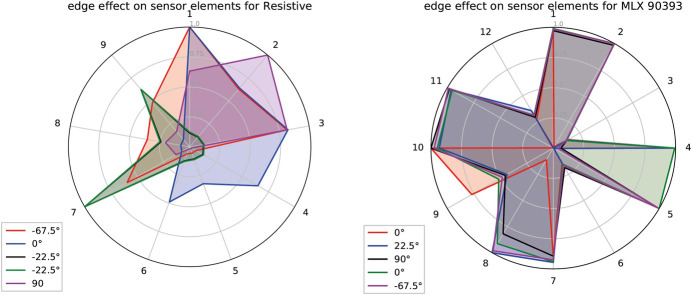
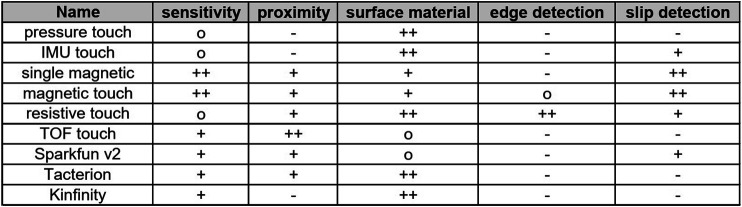
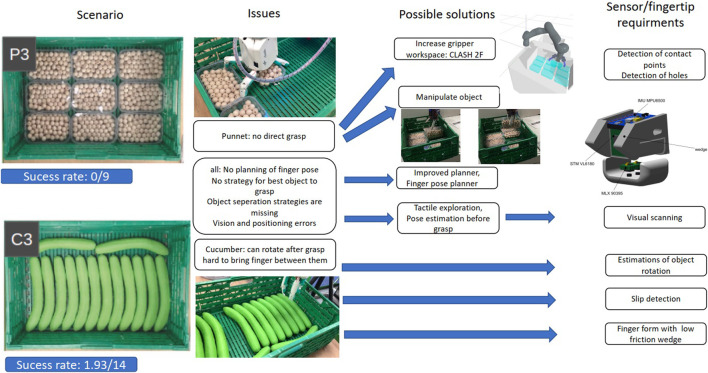
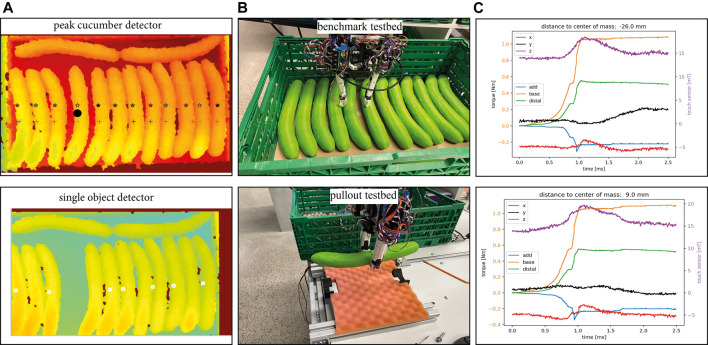
The sense of touch is a key aspect in the human capability to robustly grasp and manipulate a wide variety of objects. Despite many years of development, there is still no preferred solution for tactile sensing in robotic hands: multiple technologies are available, each one with different benefits depending on the application. This study compares the performance of different tactile sensors mounted on the variable stiffness gripper CLASH 2F, including three commercial sensors: a single taxel sensor from the companies Tacterion and Kinfinity, the Robotic Finger Sensor v2 from Sparkfun, plus a self-built resistive 3 × 3 sensor array, and two self-built magnetic 3-DoF touch sensors, one with four taxels and one with one taxel. We verify the minimal force detectable by the sensors, test if slip detection is possible with the available taxels on each sensor, and use the sensors for edge detection to obtain the orientation of the grasped object. To evaluate the benefits obtained with each technology and to assess which sensor fits better the control loop in a variable stiffness hand, we use the CLASH gripper to grasp fruits and vegetables following a published benchmark for pick and place operations. To facilitate the repetition of tests, the CLASH hand is endowed with tactile buttons that ease human-robot interactions, including execution of a predefined program, resetting errors, or commanding the full robot to move in gravity compensation mode.
Keywords: grasp benchmarking; grasp stiffness; hand design; slippage detection; tactile sensors.
Copyright © 2021 Friedl and Roa.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

References
-
- Ajoudani A., Hocaoglu E., Altobelli A., Rossi M., Battaglia E., Tsagarakis N., et al. (2016). “Reflex Control of the Pisa/IIT SoftHand during Object Slippage,” in Proc. IEEE Int. Conf. Robotics and Automation (ICRA) (IEEE; ), 1972–1979. 10.1109/icra.2016.7487344 - DOI
-
- Bhatt A., Sieler A., Puhlmann S., Brock O. (2021). Surprisingly Robust In-Hand Manipulation: An Empirical Study, Proc. Robotics Science and Systems (RSS).
-
- Büscher G., Meier M., Walck G., Haschke R., Ritter H. J. (2015). “Augmenting Curved Robot Surfaces with Soft Tactile Skin,” in Proc. IEEE/RSJ Int. Conf. On Intelligent Robots and Systems (IROS) (IEEE; ), 1514–1519. 10.1109/iros.2015.7353568 - DOI
-
- Butterfass J., Grebenstein M., Liu H., Hirzinger G. (2001). “DLR-Hand II: Next Generation of a Dextrous Robot Hand,” in Proc. IEEE Int. Conf. Robotics and Automation (ICRA) (IEEE; ), 109–114. 10.1109/ROBOT.2001.932538 - DOI
-
- Catalano M. G., Grioli G., Farnioli E., Serio A., Piazza C., Bicchi A. (2014). Adaptive Synergies for the Design and Control of the Pisa/IIT SoftHand. Int. J. Robotics Res. 33, 768–782. 10.1177/0278364913518998 - DOI
LinkOut - more resources
Full Text Sources