

An Integrated High-dexterity Cooperative Robotic Assistant for Intraocular Micromanipulation
- PMID: 34721938
- PMCID: PMC8552997
- DOI: 10.1109/icra48506.2021.9562040
An Integrated High-dexterity Cooperative Robotic Assistant for Intraocular Micromanipulation
Abstract
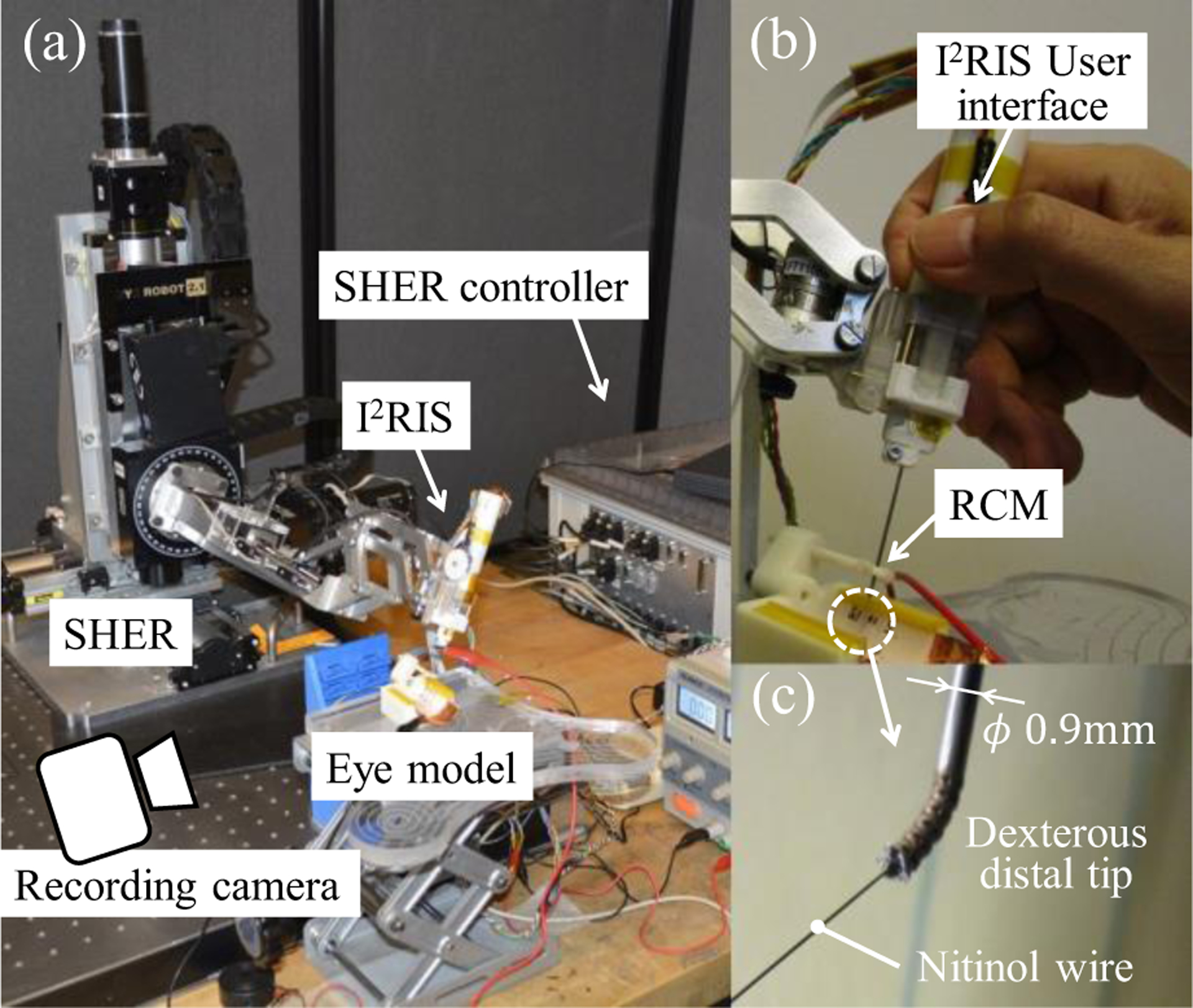
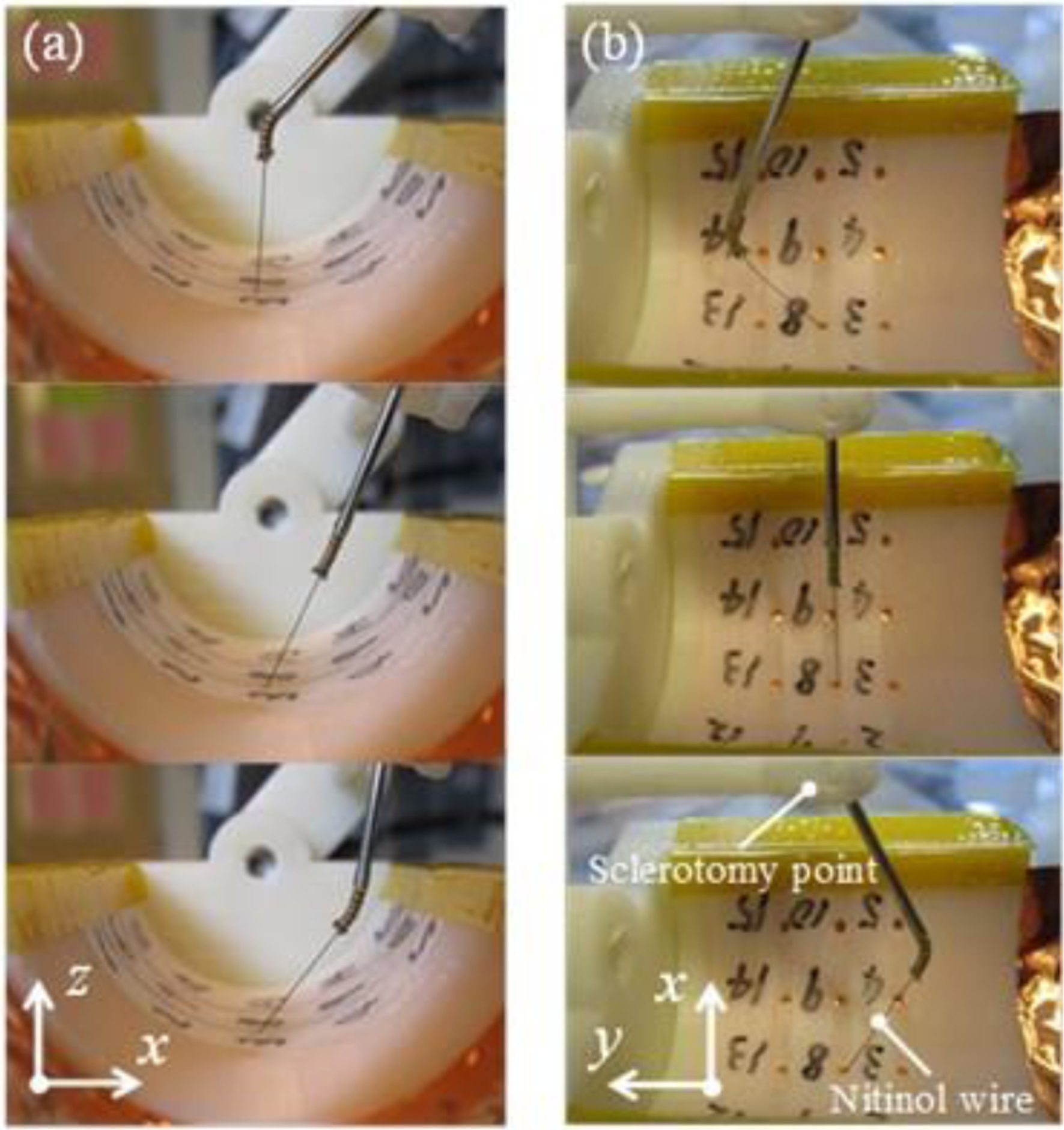
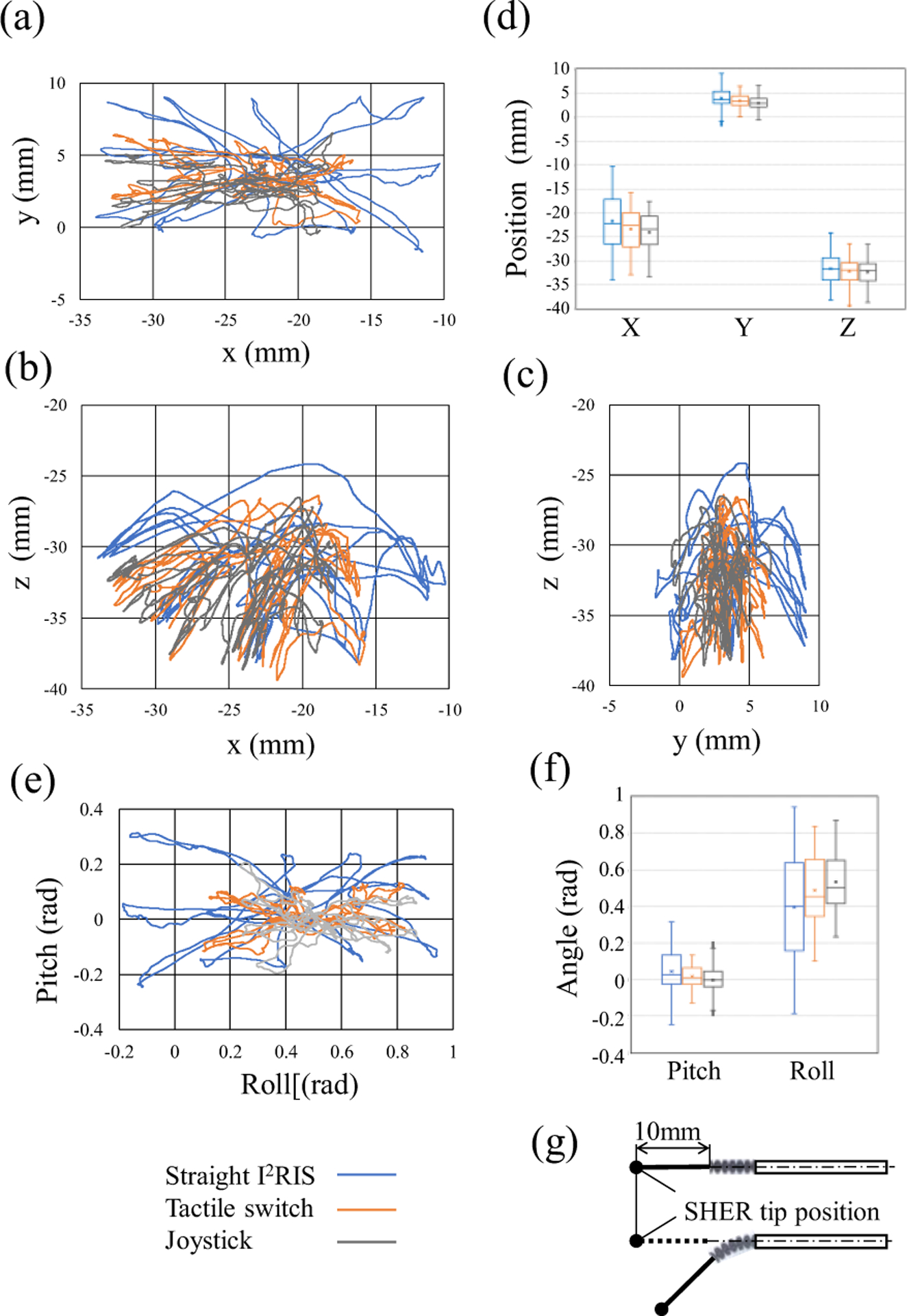
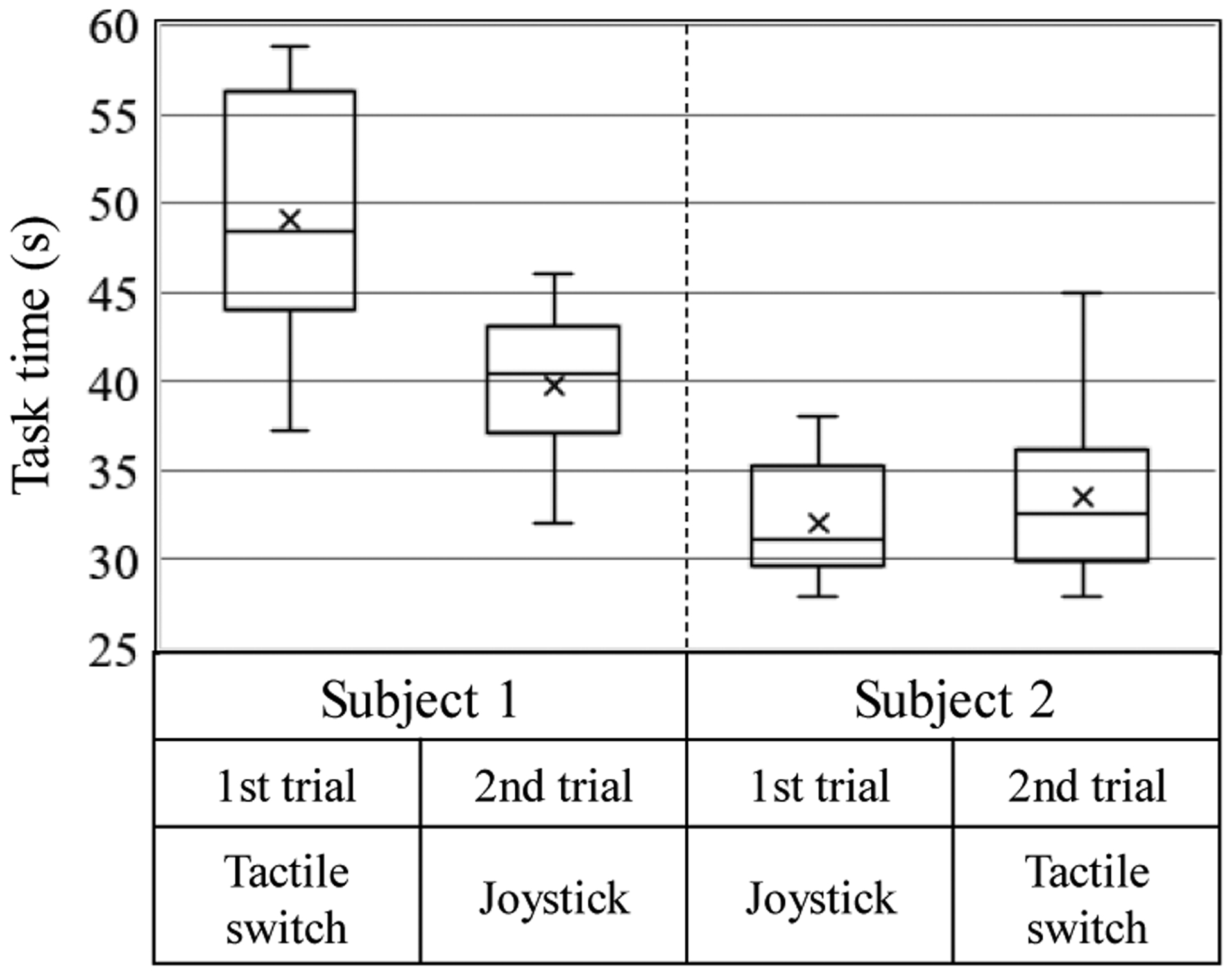
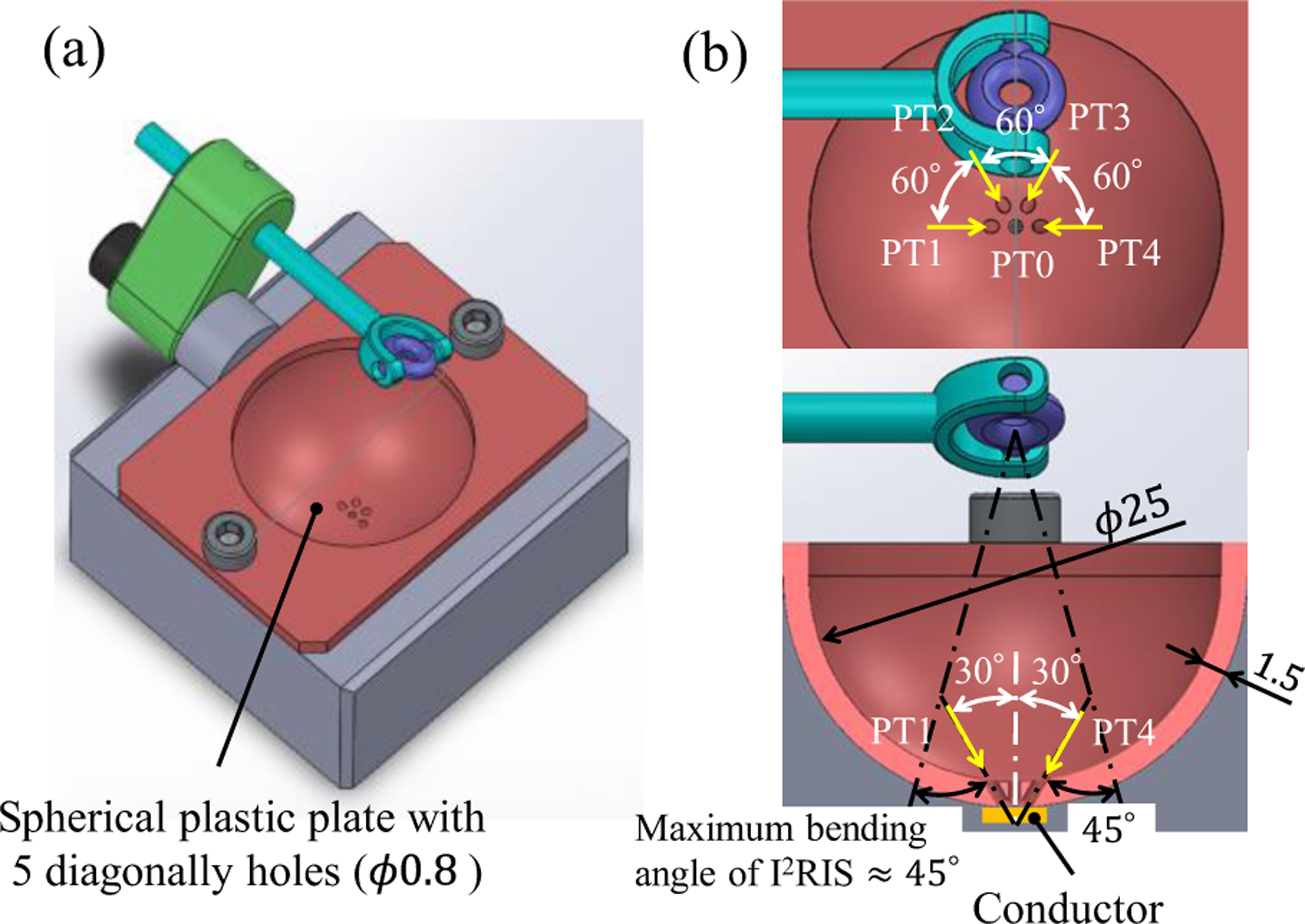
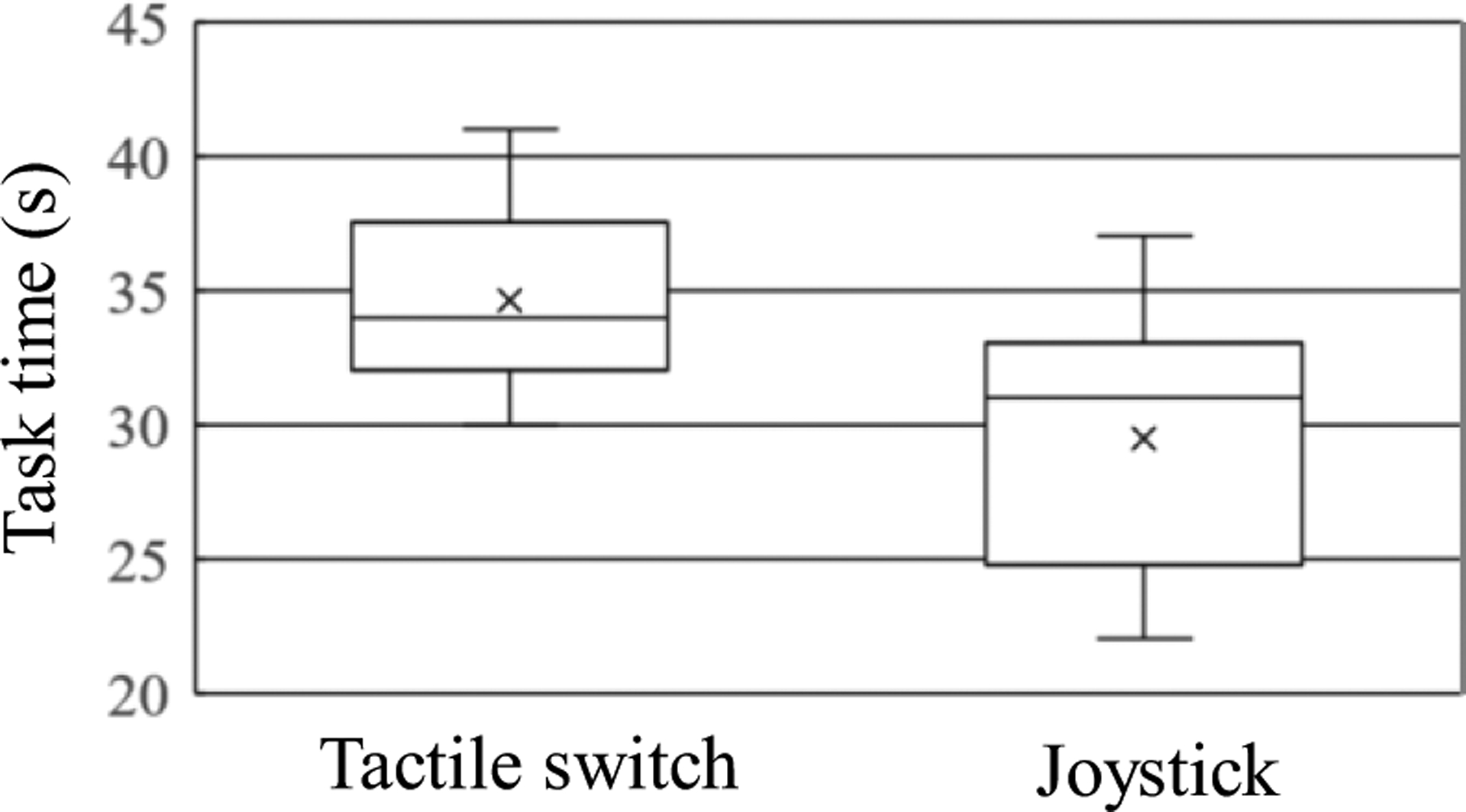
Retinal surgeons are required to manipulate multiple surgical instruments in a confined intraocular space, while the instruments are constrained at the small incisions made on the sclera. Furthermore, physiological hand tremor can affect the precision of the instrument motion. The Steady-Hand Eye Robot (SHER), developed in our previous study, enables tremor-free tool manipulation by employing a cooperative control scheme whereby the surgeon and robot can co-manipulate the surgical instruments. Although SHER enables precise and tremor-free manipulation of surgical tools, its straight and rigid structure imposes certain limitations, as it can only approach a target on the retina from one direction. As a result, the instrument could potentially collide with the eye lens when attempting to access the anterior portion of the retina. In addition, it can be difficult to approach a target on the retina from a suitable direction when accessing its anterior portion for procedures such as vein cannulation or membrane peeling. Snake-like robots offer greater dexterity and allow access to a target on the retina from suitable directions, depending on the clinical task at hand. In this study, we present an integrated, high-dexterity, cooperative robotic assistant for intraocular micromanipulation. This robotic assistant comprises an improved integrated robotic intraocular snake (I2RIS) with a user interface (a tactile switch or joystick unit) for the manipulation of the snake-like distal end and the SHER, with a detachable end-effector to which the I2RIS can be attached. The integrated system was evaluated through a set of experiments wherein subjects were requested to touch or insert into randomly-assigned targets. The results indicate that the high-dexterity robotic assistant can touch or insert the tip into the same target from multiple directions, with no significant increase in task completion time for either user interface.
Figures






References
-
- Vander Poorten E, Riviere CN, Abbott JJ, Bergeles C, Nasseri MA, Kang JU, Sznitman R, Faridpooya K, and Iordachita I, 36 - Robotic Retinal Surgery, Handbook of Robotic and Image-Guided Surgery, Elsevier, 2019, pp. 627–672.
-
- Fleming I, Balicki M, Koo J, Iordachita I, Mitchell B, Handa J, Hager G, Taylor R, “Cooperative robot assistant for retinal microsurgery,” Med. Image Comput. Comput. Assist. Interv, vol. 5242, 2008, pp.543–550. - PubMed
-
- Gijbels A, Wouters N, Stalmans P, Van Brussel H, Reynaerts D, Vander Poorten E, “Design and realisation of a novel robotic manipulator for retinal surgery,” Proc. IEEE Int. Conf. on Intelligent Robots and Systems, Tokyo, 2013, pp.3598–3603.
-
- Tanaka S, et al. “Quantitative assessment of manual and robotic microcannulation for eye surgery using new eye model,” Int J Med Robotics Comput Assist Surg, April. 2014. - PubMed
-
- Wei W, Popplewell C, Chang S, Fine HF, Simaan N, “Enabling technology for microvascular stenting in ophthalmic surgery,” Journal of Medical Devices, vol. 4, no. 1, March. 2010.
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials