

Ankle muscles drive mediolateral center of pressure control to ensure stable steady state gait
- PMID: 34728667
- PMCID: PMC8563802
- DOI: 10.1038/s41598-021-00463-8
Ankle muscles drive mediolateral center of pressure control to ensure stable steady state gait
Abstract
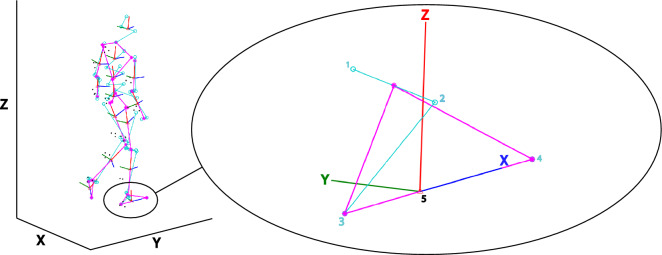
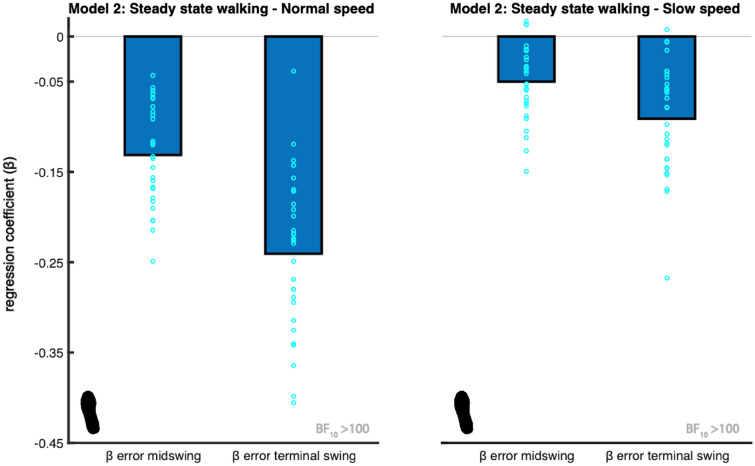
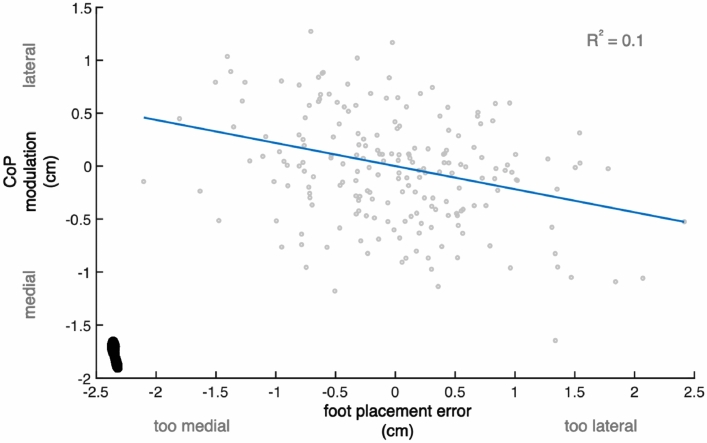
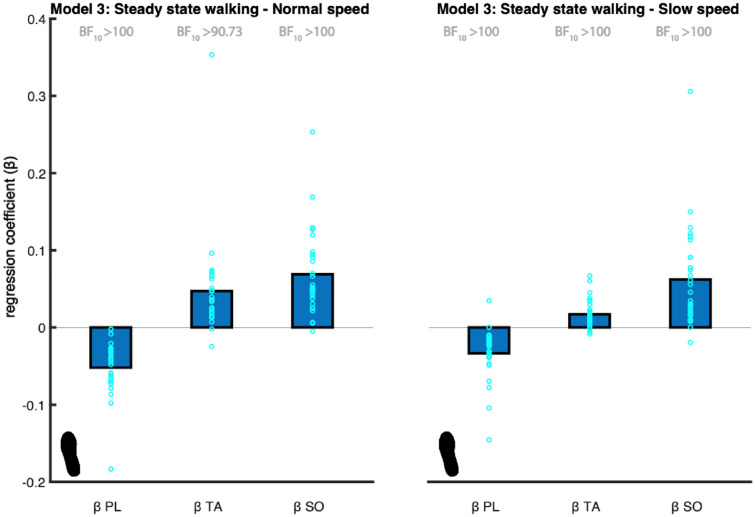
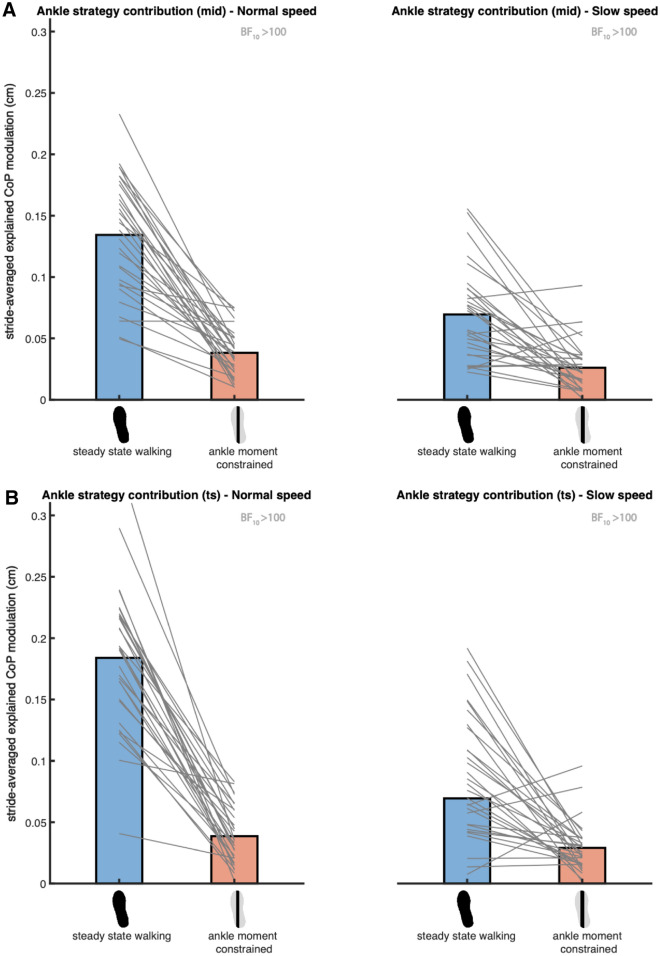
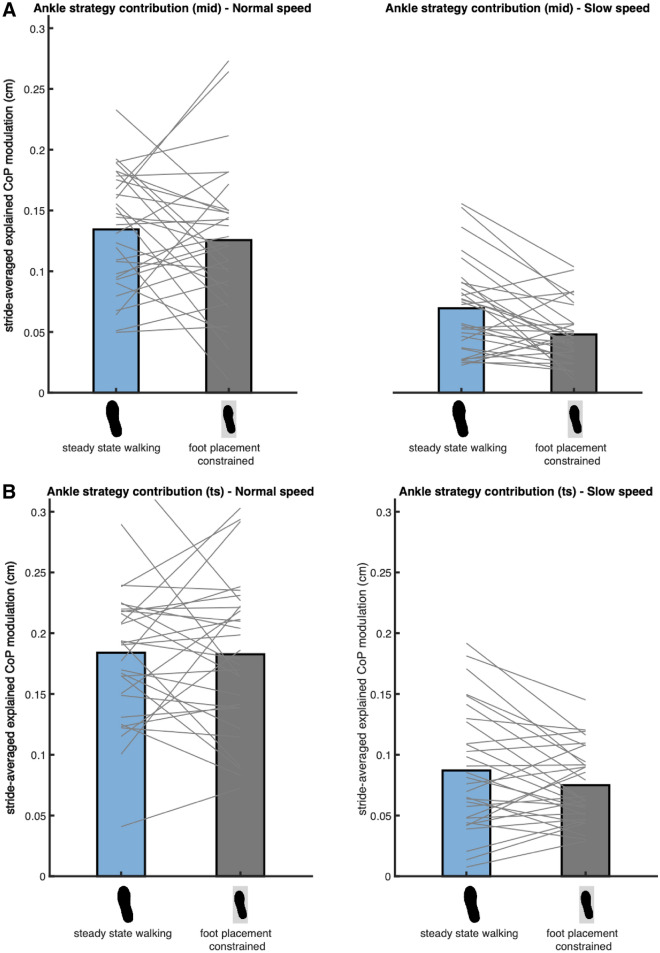
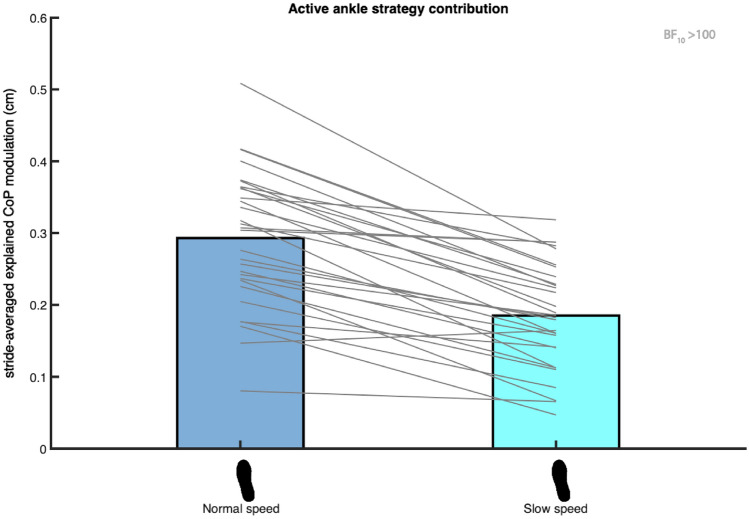
During steady-state walking, mediolateral gait stability can be maintained by controlling the center of pressure (CoP). The CoP modulates the moment of the ground reaction force, which brakes and reverses movement of the center of mass (CoM) towards the lateral border of the base of support. In addition to foot placement, ankle moments serve to control the CoP. We hypothesized that, during steady-state walking, single stance ankle moments establish a CoP shift to correct for errors in foot placement. We expected ankle muscle activity to be associated with this complementary CoP shift. During treadmill walking, full-body kinematics, ground reaction forces and electromyography were recorded in thirty healthy participants. We found a negative relationship between preceding foot placement error and CoP displacement during single stance; steps that were too medial were compensated for by a lateral CoP shift and vice versa, steps that were too lateral were compensated for by a medial CoP shift. Peroneus longus, soleus and tibialis anterior activity correlated with these CoP shifts. As such, we identified an (active) ankle strategy during steady-state walking. As expected, absolute explained CoP variance by foot placement error decreased when walking with shoes constraining ankle moments. Yet, contrary to our expectations that ankle moment control would compensate for constrained foot placement, the absolute explained CoP variance by foot placement error did not increase when foot placement was constrained. We argue that this lack of compensation reflects the interdependent nature of ankle moment and foot placement control. We suggest that single stance ankle moments do not only compensate for preceding foot placement errors, but also assist control of the subsequent foot placement. Foot placement and ankle moment control are 'caught' in a circular relationship, in which constraints imposed on one will also influence the other.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Research Materials
