

Skin-like hydrogel devices for wearable sensing, soft robotics and beyond
- PMID: 34755087
- PMCID: PMC8564057
- DOI: 10.1016/j.isci.2021.103174
Skin-like hydrogel devices for wearable sensing, soft robotics and beyond
Abstract
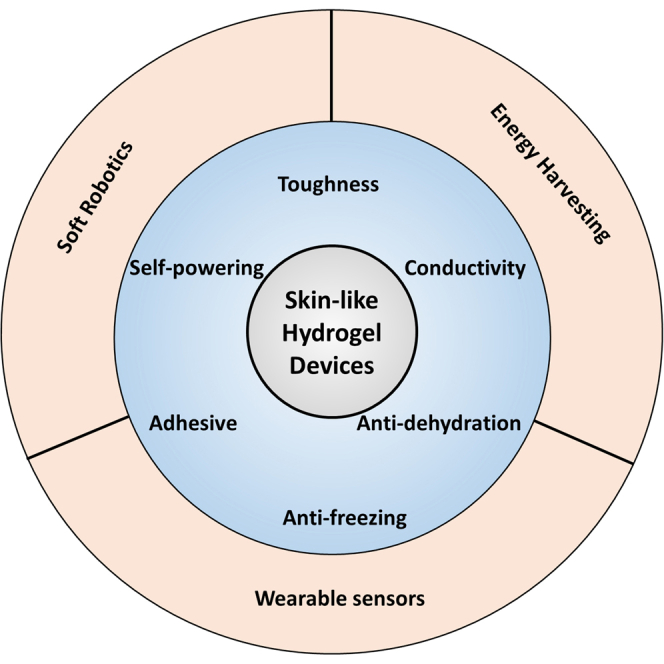
Skin-like electronics are developing rapidly to realize a variety of applications such as wearable sensing and soft robotics. Hydrogels, as soft biomaterials, have been studied intensively for skin-like electronic utilities due to their unique features such as softness, wetness, biocompatibility and ionic sensing capability. These features could potentially blur the gap between soft biological systems and hard artificial machines. However, the development of skin-like hydrogel devices is still in its infancy and faces challenges including limited functionality, low ambient stability, poor surface adhesion, and relatively high power consumption (as ionic sensors). This review aims to summarize current development of skin-inspired hydrogel devices to address these challenges. We first conduct an overview of hydrogels and existing strategies to increase their toughness and conductivity. Next, we describe current approaches to leverage hydrogel devices with advanced merits including anti-dehydration, anti-freezing, and adhesion. Thereafter, we highlight state-of-the-art skin-like hydrogel devices for applications including wearable electronics, soft robotics, and energy harvesting. Finally, we conclude and outline the future trends.
Keywords: Biodevices; Bioelectronics; Biomaterials; Robotics.
© 2021.
Conflict of interest statement
The authors declare no conflict of interest.
Figures


Similar articles
-
Hydrogel fibers for wearable sensors and soft actuators.iScience. 2023 May 3;26(6):106796. doi: 10.1016/j.isci.2023.106796. eCollection 2023 Jun 16. iScience. 2023. PMID: 37213224 Free PMC article. Review.
-
Recent Advances in Bioinspired Hydrogels: Materials, Devices, and Biosignal Computing.ACS Biomater Sci Eng. 2023 May 8;9(5):2048-2069. doi: 10.1021/acsbiomaterials.1c00741. Epub 2021 Nov 16. ACS Biomater Sci Eng. 2023. PMID: 34784170 Free PMC article. Review.
-
Integrated Soft Ionotronic Skin with Stretchable and Transparent Hydrogel-Elastomer Ionic Sensors for Hand-Motion Monitoring.Soft Robot. 2019 Jun;6(3):368-376. doi: 10.1089/soro.2018.0116. Epub 2019 Mar 8. Soft Robot. 2019. PMID: 30848994
-
Nanomaterial-based biohybrid hydrogel in bioelectronics.Nano Converg. 2023 Feb 10;10(1):8. doi: 10.1186/s40580-023-00357-7. Nano Converg. 2023. PMID: 36763293 Free PMC article. Review.
-
Programmable Morphing Hydrogels for Soft Actuators and Robots: From Structure Designs to Active Functions.Acc Chem Res. 2022 Jun 7;55(11):1533-1545. doi: 10.1021/acs.accounts.2c00046. Epub 2022 Apr 12. Acc Chem Res. 2022. PMID: 35413187
Cited by
-
Transparent Electronics for Wearable Electronics Application.Chem Rev. 2023 Aug 23;123(16):9982-10078. doi: 10.1021/acs.chemrev.3c00139. Epub 2023 Aug 5. Chem Rev. 2023. PMID: 37542724 Free PMC article. Review.
-
Self-Healable, Antimicrobial and Conductive Hydrogels Based on Dynamic Covalent Bonding with Silver Nanoparticles for Flexible Sensor.Polymers (Basel). 2024 Dec 29;17(1):54. doi: 10.3390/polym17010054. Polymers (Basel). 2024. PMID: 39795457 Free PMC article.
-
Soft Robotics for Parkinson's Disease Supported by Functional Materials and Artificial Intelligence.BME Front. 2025 Jul 2;6:0143. doi: 10.34133/bmef.0143. eCollection 2025. BME Front. 2025. PMID: 40606522 Free PMC article. Review.
-
Advanced function, design and application of skin substitutes for skin regeneration.Mater Today Bio. 2023 Dec 20;24:100918. doi: 10.1016/j.mtbio.2023.100918. eCollection 2024 Feb. Mater Today Bio. 2023. PMID: 38223459 Free PMC article. Review.
-
Recent Progress of Anti-Freezing, Anti-Drying, and Anti-Swelling Conductive Hydrogels and Their Applications.Polymers (Basel). 2024 Apr 2;16(7):971. doi: 10.3390/polym16070971. Polymers (Basel). 2024. PMID: 38611229 Free PMC article. Review.
References
-
- Acome E., Mitchell S.K., Morrissey T.G., Emmett M.B., Benjamin C., King M., Radakovitz M., Keplinger C. Hydraulically amplified self-healing electrostatic actuators with muscle-like performance. Science. 2018;359:61–65. - PubMed
-
- Ahmed S., Nakajima T., Kurokawa T., Haque M.A., Gong J.P. Brittle–ductile transition of double network hydrogels: mechanical balance of two networks as the key factor. Polymer. 2014;55:914–923.
-
- Van Amerongen G.J. Thepermeability of different rubbers to gases and its relation to diffusivity and solubility. J. Appl. Phys. 1946;17:972–985.
-
- Amoli V., Kim J.S., Kim S.Y., Koo J., Chung Y.S., Choi H., Do Hwan K. Ionic tactile sensors for emerging human-interactive technologies: areview of recent progress. Adv. Funct.Mater. 2019;30:1904532.
Publication types
LinkOut - more resources
Full Text Sources
Miscellaneous
