

A decade retrospective of medical robotics research from 2010 to 2020
- PMID: 34757801
- PMCID: PMC8890492
- DOI: 10.1126/scirobotics.abi8017
A decade retrospective of medical robotics research from 2010 to 2020
Abstract
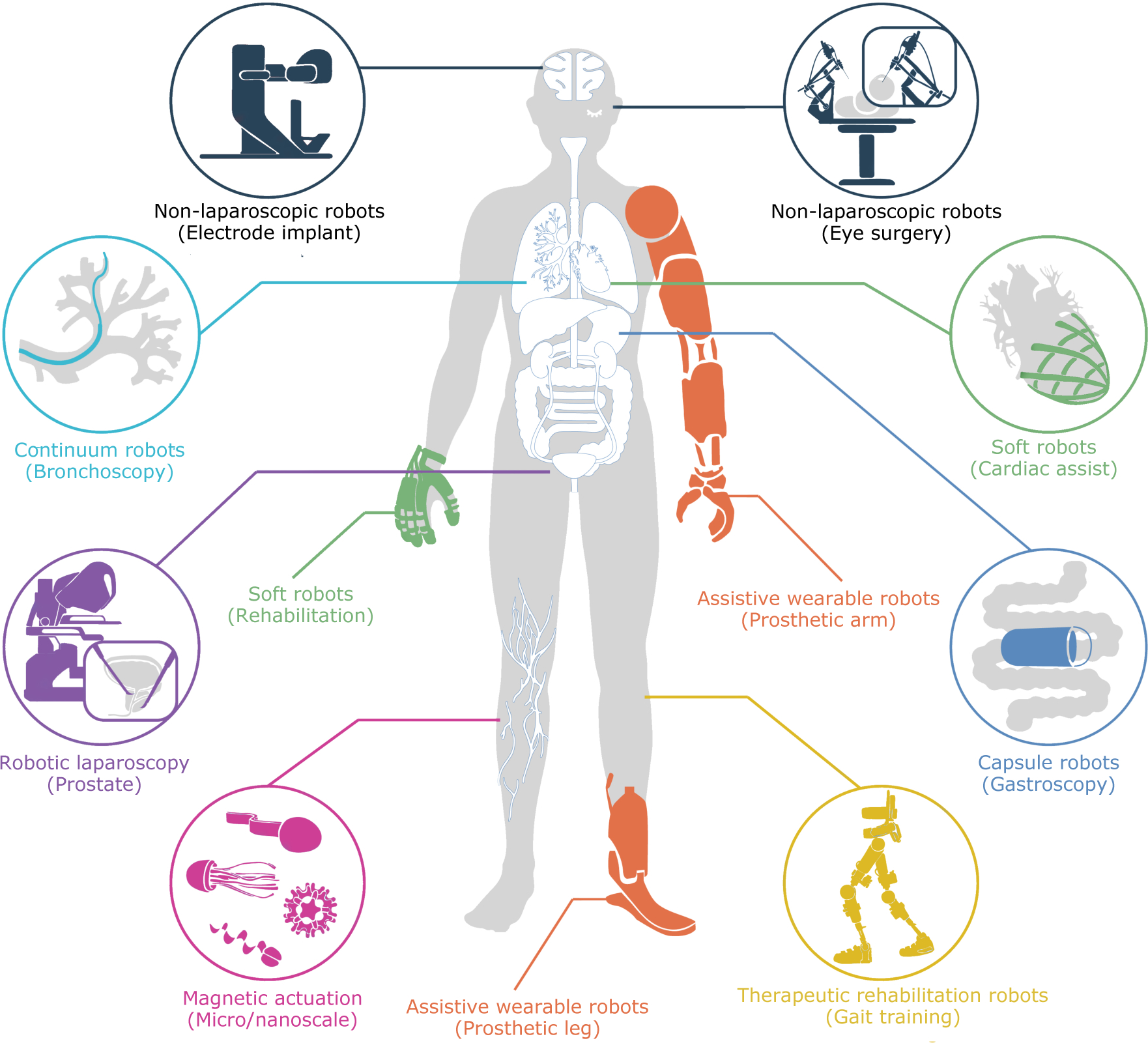
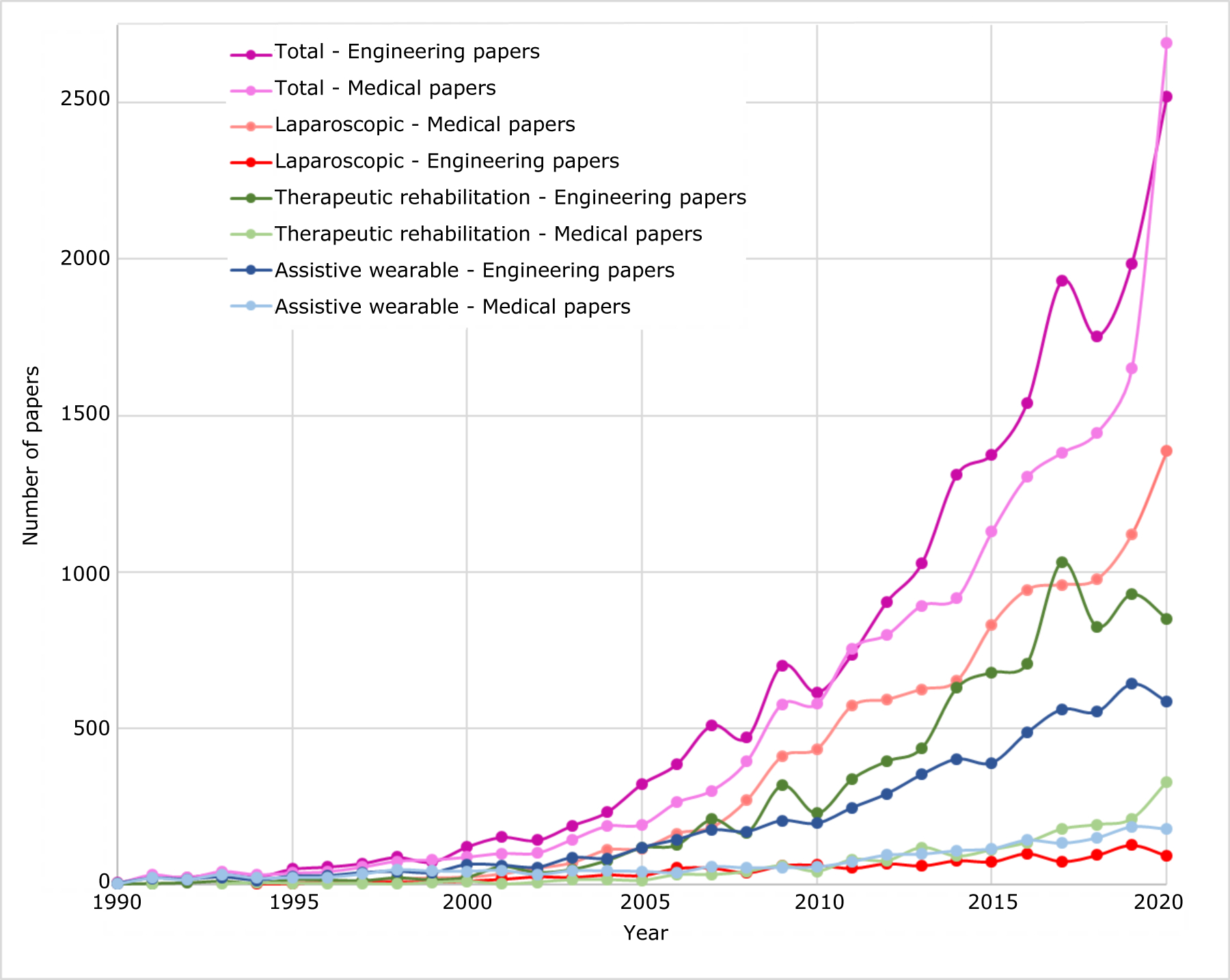
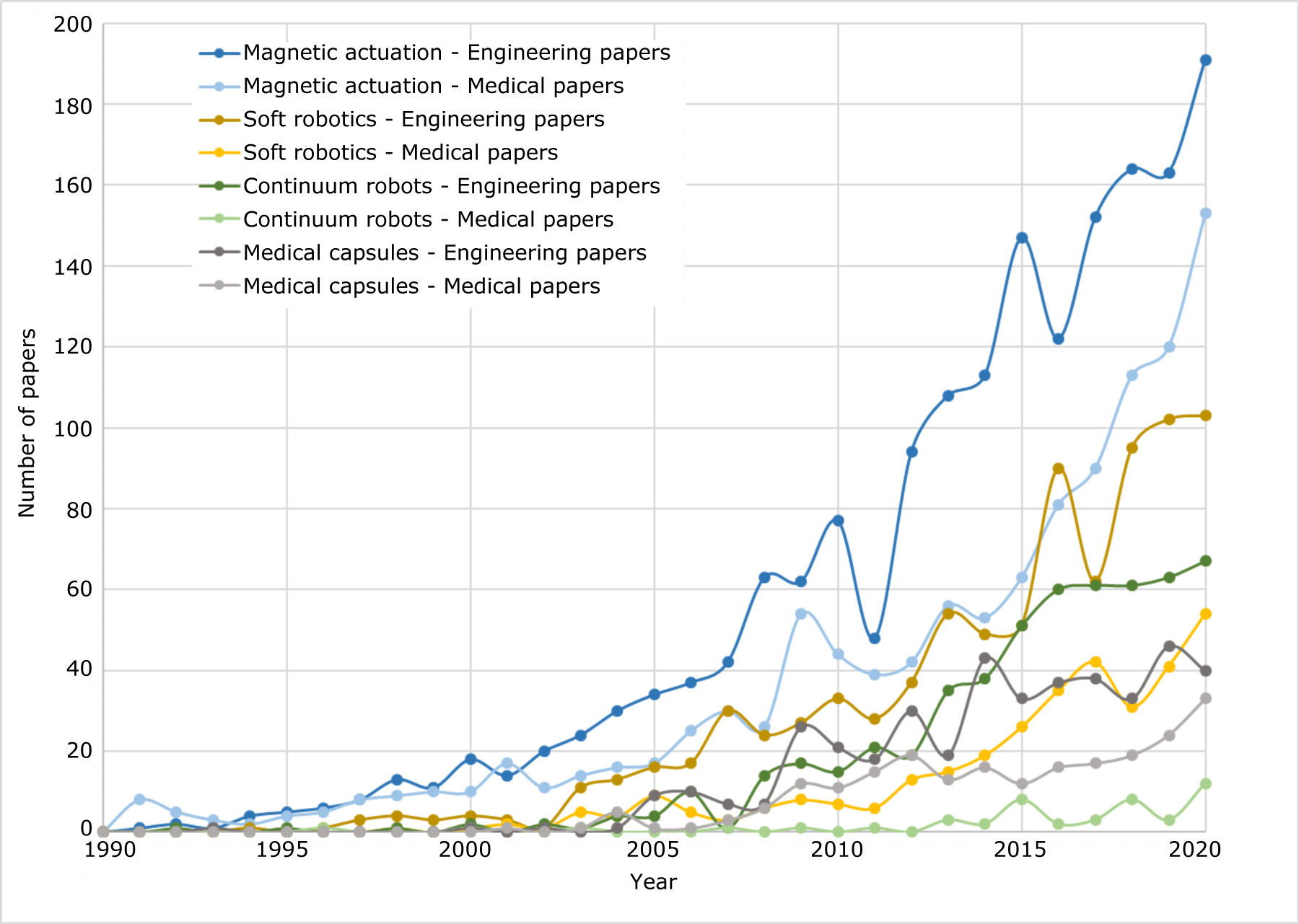
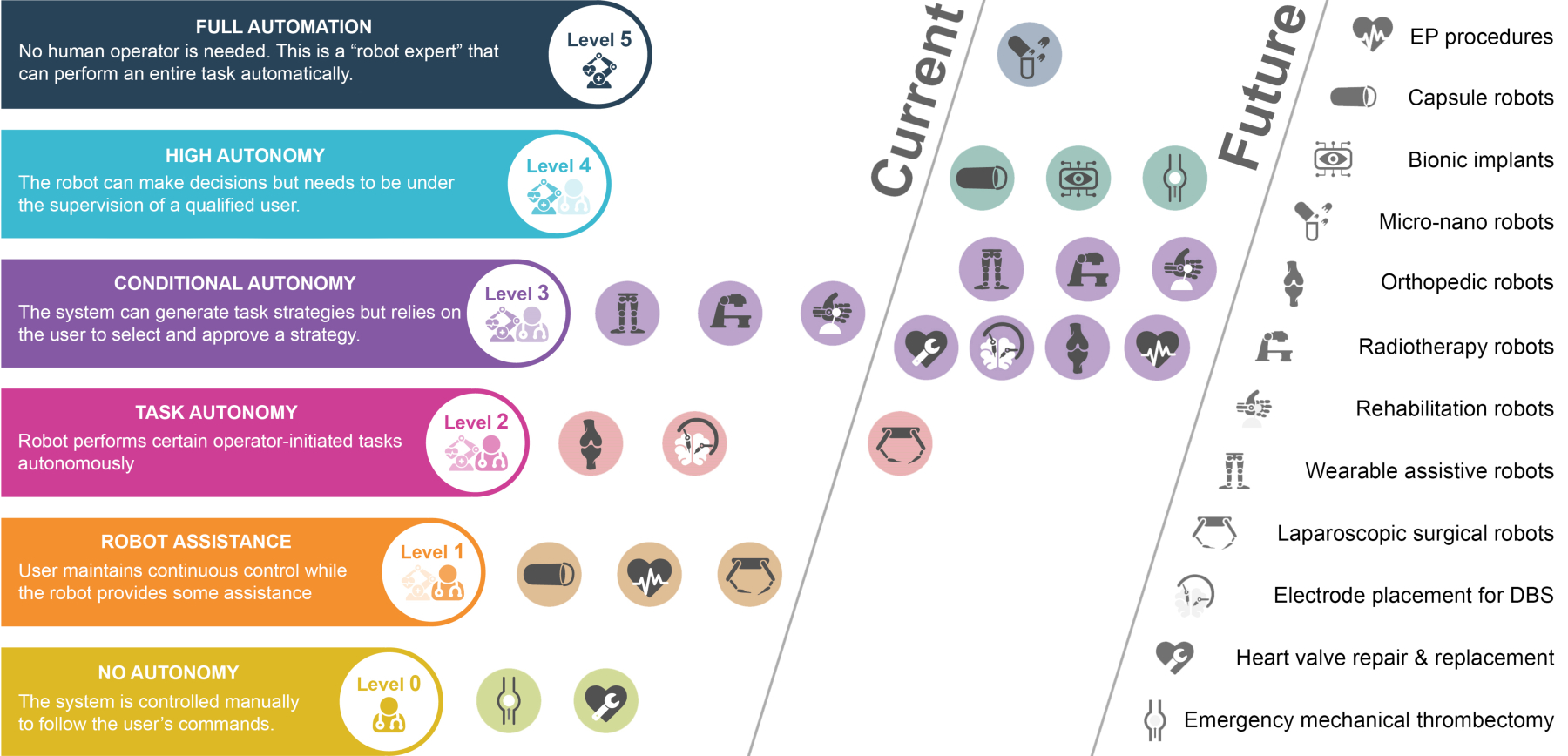
Robotics is a forward-looking discipline. Attention is focused on identifying the next grand challenges. In an applied field such as medical robotics, however, it is important to plan the future based on a clear understanding of what the research community has recently accomplished and where this work stands with respect to clinical needs and commercialization. This Review article identifies and analyzes the eight key research themes in medical robotics over the past decade. These thematic areas were identified using search criteria that identified the most highly cited papers of the decade. Our goal for this Review article is to provide an accessible way for readers to quickly appreciate some of the most exciting accomplishments in medical robotics over the past decade; for this reason, we have focused only on a small number of seminal papers in each thematic area. We hope that this article serves to foster an entrepreneurial spirit in researchers to reduce the widening gap between research and translation.
Conflict of interest statement
Figures
References
-
- Howe RD, Matsuoka Y, Robotics for surgery. Annual review of biomedical engineering 1, 211–240 (1999). Citations: 160 papers; 65 patents. - PubMed
-
- Satava RM, Surgical robotics: the early chronicles: a personal historical perspective. Surgical Laparoscopy Endoscopy & Percutaneous Techniques 12, 6–16 (2002). Citations: 121 papers; 40 patents. - PubMed
-
- Simaan N, Yasin RM, Wang L, Medical technologies and challenges of robot-assisted minimally invasive intervention and diagnostics. Annual Review of Control, Robotics, and Autonomous Systems 1, 465–490 (2018). Citations: 37 papers; 0 patents.
-
- Kwoh YS, Hou J, Jonckheere EA, Hayati S, A robot with improved absolute positioning accuracy for CT guided stereotactic brain surgery. IEEE Transactions on Biomedical Engineering 35, 153–160 (1988). Citations: 491 papers; 99 patents. - PubMed
-
- Taylor RH, Mittelstadt BD, Paul HA, Hanson W, Kazanzides P, Zuhars JF, Williamson B, Musits BL, Glassman E, Bargar WL, An image-directed robotic system for precise orthopaedic surgery. IEEE Transactions on Robotics and Automation 10, 261–275 (1994). Citations: 156 papers, 46 patents.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
