

Vibrational Transportation on a Platform Subjected to Sinusoidal Displacement Cycles Employing Dry Friction Control
- PMID: 34770585
- PMCID: PMC8587818
- DOI: 10.3390/s21217280
Vibrational Transportation on a Platform Subjected to Sinusoidal Displacement Cycles Employing Dry Friction Control
Abstract
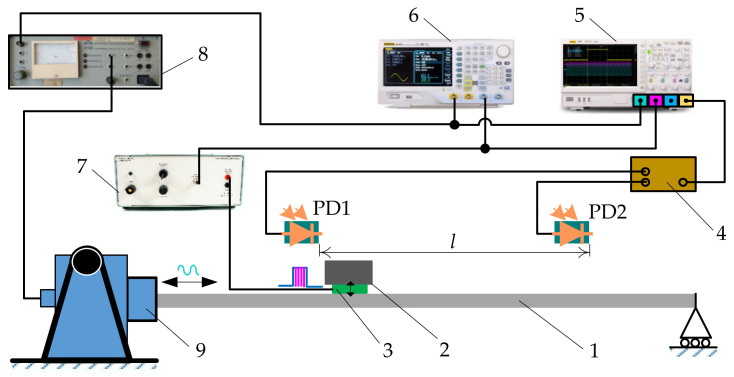
Currently used vibrational transportation methods are usually based on asymmetries of geometric, kinematic, wave, or time types. This paper investigates the vibrational transportation of objects on a platform that is subjected to sinusoidal displacement cycles, employing periodic dynamic dry friction control. This manner of dry friction control creates an asymmetry, which is necessary to move the object. The theoretical investigation on functional capabilities and transportation regimes was carried out using a developed parametric mathematical model, and the control parameters that determine the transportation characteristics such as velocity and direction were defined. To test the functional capabilities of the proposed method, an experimental setup was developed, and experiments were carried out. The results of the presented research indicate that the proposed method ensures smooth control of the transportation velocity in a wide range and allows it to change the direction of motion. Moreover, the proposed method offers other new functional capabilities, such as a capability to move individual objects on the same platform in opposite directions and at different velocities at the same time by imposing different friction control parameters on different regions of the platform or on different objects. In addition, objects can be subjected to translation and rotation at the same time by imposing different friction control parameters on different regions of the platform. The presented research extends the classical theory of vibrational transportation and has a practical value for industries that operate manufacturing systems performing tasks such as handling and transportation, positioning, feeding, sorting, aligning, or assembling.
Keywords: control; dry friction; handling and transportation; motion control; sinusoidal excitation; vibrations.
Conflict of interest statement
The authors declare no conflict of interest.
Figures








References
-
- Yamaguchi K., Higashimori M. 1-Actuator 3-DoF Manipulation Using a Virtual Turntable Based on Differential Friction Surface; Proceedings of the 2018 IEEE International Conference on Robotics and Automation; Brisbane, QLD, Australia. 21–25 May 2018; Piscataway, NJ, USA: IEEE; 2018. pp. 3573–3580. - DOI
-
- Yuan W., Hang K., Kragic D., Wang M.Y., Stork J.A. End-to-end nonprehensile rearrangement with deep reinforcement learning and simulation-to-reality transfer. Rob. Auton. Syst. 2019;119:119–134. doi: 10.1016/j.robot.2019.06.007. - DOI
-
- Hogan F.R., Rodriguez A. Reactive planar non-prehensile manipulation with hybrid model predictive control. Int. J. Robot. Res. 2020;39:755–773. doi: 10.1177/0278364920913938. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
