

Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications
- PMID: 34796695
- PMCID: PMC8811828
- DOI: 10.1002/advs.202103694
Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications
Abstract
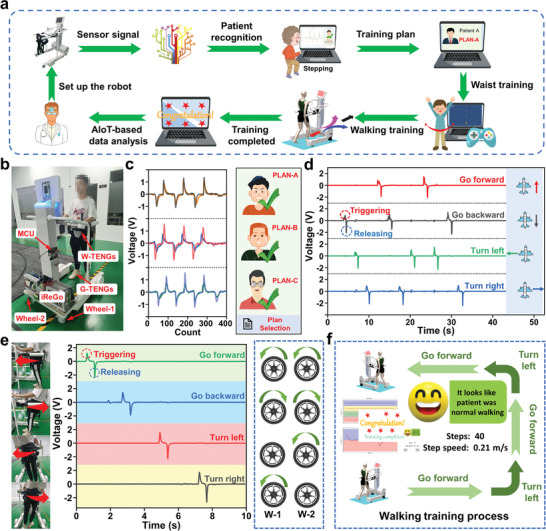
Gait and waist motions always contain massive personnel information and it is feasible to extract these data via wearable electronics for identification and healthcare based on the Internet of Things (IoT). There also remains a demand to develop a cost-effective human-machine interface to enhance the immersion during the long-term rehabilitation. Meanwhile, triboelectric nanogenerator (TENG) revealing its merits in both wearable electronics and IoT tends to be a possible solution. Herein, the authors present wearable TENG-based devices for gait analysis and waist motion capture to enhance the intelligence and performance of the lower-limb and waist rehabilitation. Four triboelectric sensors are equidistantly sewed onto a fabric belt to recognize the waist motion, enabling the real-time robotic manipulation and virtual game for immersion-enhanced waist training. The insole equipped with two TENG sensors is designed for walking status detection and a 98.4% identification accuracy for five different humans aiming at rehabilitation plan selection is achieved by leveraging machine learning technology to further analyze the signals. Through a lower-limb rehabilitation robot, the authors demonstrate that the sensory system performs well in user recognition, motion monitoring, as well as robot and gaming-aided training, showing its potential in IoT-based smart healthcare applications.
Keywords: human-machine interface; machine learning; robot-aided rehabilitation; smart healthcare; triboelectric sensors.
© 2021 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures





References
-
- Shi Q., Dong B., He T., Sun Z., Zhu J., Zhang Z., Lee C., InfoMat 2020, 2, 1131.
-
- Cho Y., Pak S., Lee Y. G., Hwang J. S., Giraud P., An G. H., Cha S. N., Adv. Funct. Mater. 2020, 30, 1908479.
-
- Wang S., Fang Y., He H., Zhang L., Li C., Ouyang J., Adv. Funct. Mater. 2021, 31, 2007495.
-
- Zhang Q., Li L., Wang T., Jiang Y., Tian Y., Jin T., Yue T., Lee C., Nano Energy 2021, 90, 106501.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources