

Insights on embodiment induced by visuo-tactile stimulation during robotic telepresence
- PMID: 34811420
- PMCID: PMC8609005
- DOI: 10.1038/s41598-021-02091-8
Insights on embodiment induced by visuo-tactile stimulation during robotic telepresence
Abstract
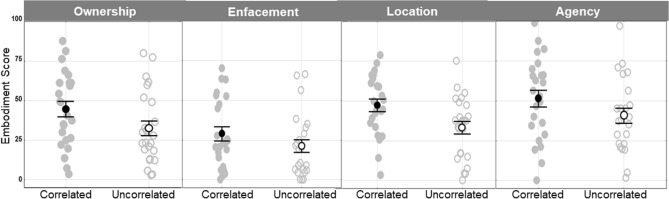
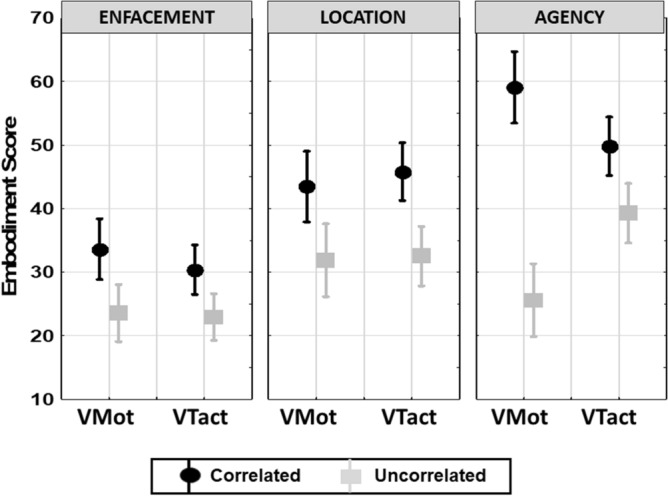
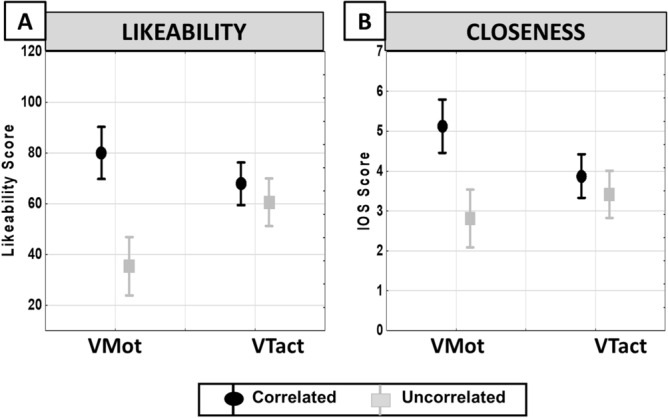
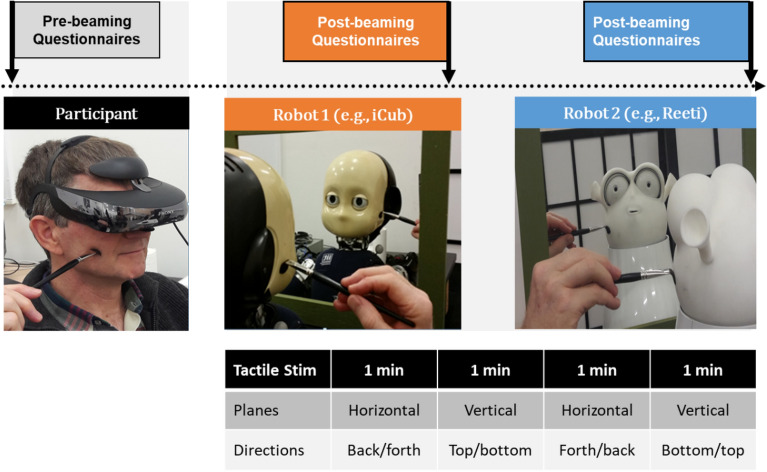
Using a simple neuroscience-inspired procedure to beam human subjects into robots, we previously demonstrated by visuo-motor manipulations that embodiment into a robot can enhance the acceptability and closeness felt towards the robot. In that study, the feelings of likeability and closeness toward the robot were significantly related to the sense of agency, independently of the sensations of enfacement and location. Here, using the same paradigm we investigated the effect of a purely sensory manipulation on the sense of robotic embodiment associated to social cognition. Wearing a head-mounted display, participants saw the visual scene captured from the robot eyes. By positioning a mirror in front of the robot, subjects saw themselves as a robot. Tactile stimulation was provided by stroking synchronously or not with a paintbrush the same location of the subject and robot faces. In contrast to the previous motor induction of embodiment which particularly affected agency, tactile induction yields more generalized effects on the perception of ownership, location and agency. Interestingly, the links between positive social feelings towards the robot and the strength of the embodiment sensations were not observed. We conclude that the embodiment into a robot is not sufficient in itself to induce changes in social cognition.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Kilteni K, Groten R, Slater M. The sense of embodiment in virtual reality. Presence Teleoperators Virtual Environ. 2012;21:373–387. doi: 10.1162/PRES_a_00124. - DOI
-
- Makin TR, De Vignemont F, Faisal AA. Neurocognitive barriers to the embodiment of technology. Nat. Biomed. Eng. 2017;1:0014. doi: 10.1038/s41551-016-0014. - DOI
LinkOut - more resources
Full Text Sources
