

Adaptive Fast Non-Singular Terminal Sliding Mode Path Following Control for an Underactuated Unmanned Surface Vehicle with Uncertainties and Unknown Disturbances
- PMID: 34833530
- PMCID: PMC8618038
- DOI: 10.3390/s21227454
Adaptive Fast Non-Singular Terminal Sliding Mode Path Following Control for an Underactuated Unmanned Surface Vehicle with Uncertainties and Unknown Disturbances
Abstract
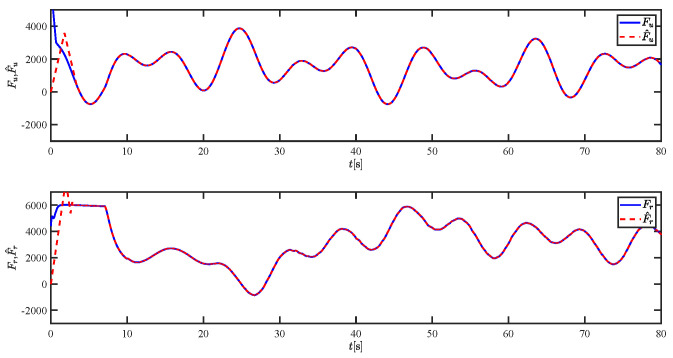
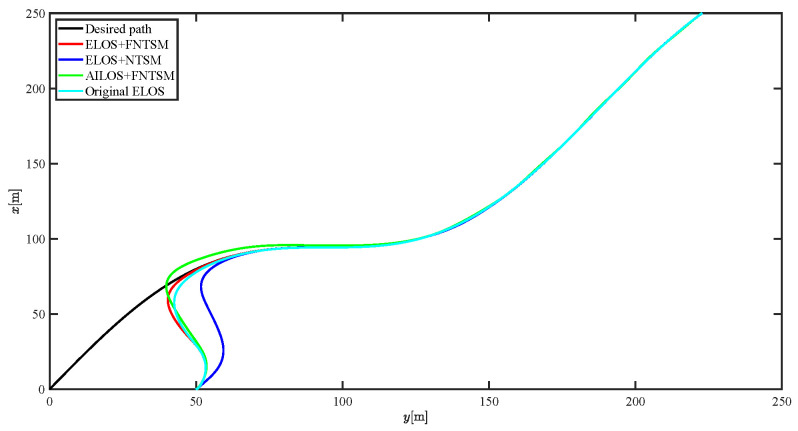
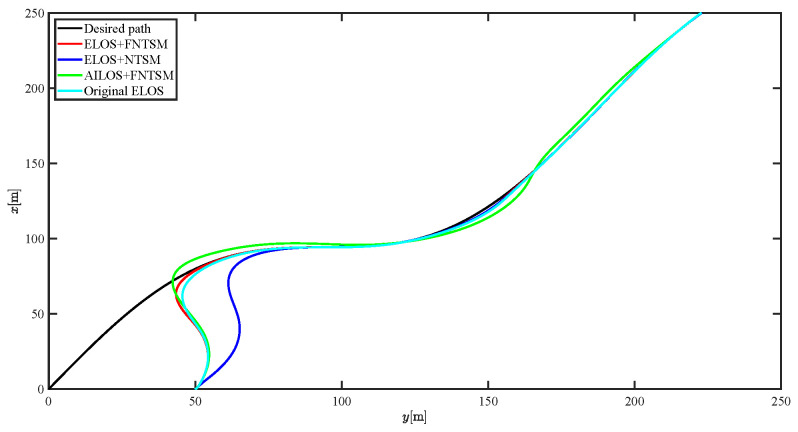
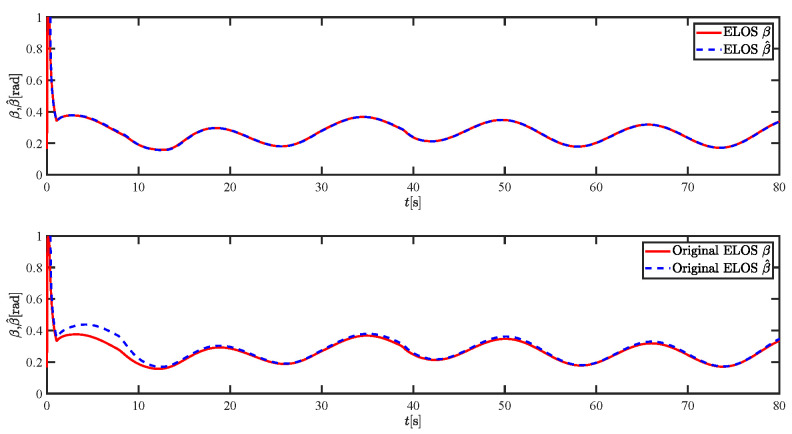
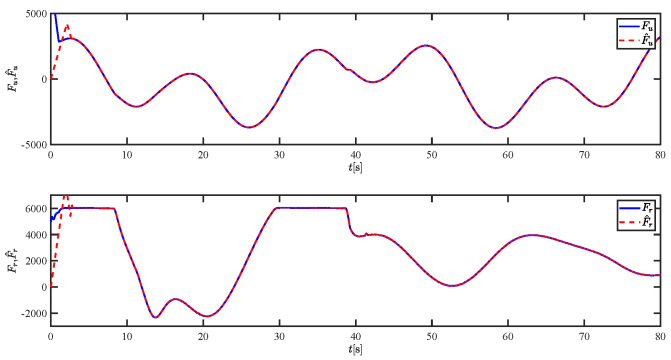
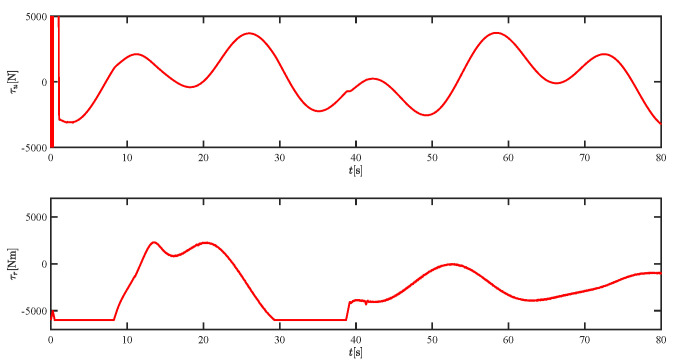
This paper focuses on an issue involving robust adaptive path following for the uncertain underactuated unmanned surface vehicle with time-varying large sideslips angle and actuator saturation. An improved line-of-sight guidance law based on a reduced-order extended state observer is proposed to address the large sideslip angle that occurs in practical navigation. Next, the finite-time disturbances observer is designed by considering the perturbations parameter of the model and the unknown disturbances of the external environment as the lumped disturbances. Then, an adaptive term is introduced into Fast Non-singular Terminal Sliding Mode Control to design the path following controllers. Finally, considering the saturation of actuator, an auxiliary dynamic system is introduced. By selecting the appropriate design parameters, all the signals of the whole path following a closed-loop system can be ultimately bounded. Real-time control of path following can be achieved by transferring data from shipborne sensors such as GPS, combined inertial guidance and anemoclinograph to the Fast Non-singular Terminal Sliding Mode controller. Two examples as comparisons were carried out to demonstrate the validity of the proposed control approach.
Keywords: fast non-singular terminal sliding mode control; line-of-sight; path following; sensor application; unmanned surface vehicle.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



























References
-
- Mu D., Wang G., Fan Y., Sun X., Qiu B. Adaptive los path following for a podded propulsion unmanned surface vehicle with uncertainty of model and actuator saturation. Appl. Sci. 2017;7:1232. doi: 10.3390/app7121232. - DOI
-
- Qiu B., Wang G., Fan Y. Predictor los-based trajectory linearization control for path following of underactuated unmanned surface vehicle with input saturation. Ocean. Eng. 2020;214:107874. doi: 10.1016/j.oceaneng.2020.107874. - DOI
-
- Zheng Z., Huo W. Planar path following control for stratospheric airship. Iet Control Theory Appl. 2013;7:185–201. doi: 10.1049/iet-cta.2011.0462. - DOI
-
- Fossen T.I., Pettersen K.Y. On uniform semiglobal exponential stability (USGES) of proportional line-of-sight guidance laws. Automatica. 2014;50:2912–2917. doi: 10.1016/j.automatica.2014.10.018. - DOI
Grants and funding
- 61976033/National Natural Science Foundation of China
- 51609033/National Natural Science Foundation of China
- 20180520005/Natural Science Foundation of Liaoning Province
- 2019JH8/10100100/Key Development Guidance Program of Liaoning Province of China
- 2019J11CY014/Soft Science Research Program of Dalian City of China
LinkOut - more resources
Full Text Sources
