

Fractional-Order Sensing and Control: Embedding the Nonlinear Dynamics of Robot Manipulators into the Multidimensional Scaling Method
- PMID: 34833812
- PMCID: PMC8624433
- DOI: 10.3390/s21227736
Fractional-Order Sensing and Control: Embedding the Nonlinear Dynamics of Robot Manipulators into the Multidimensional Scaling Method
Abstract
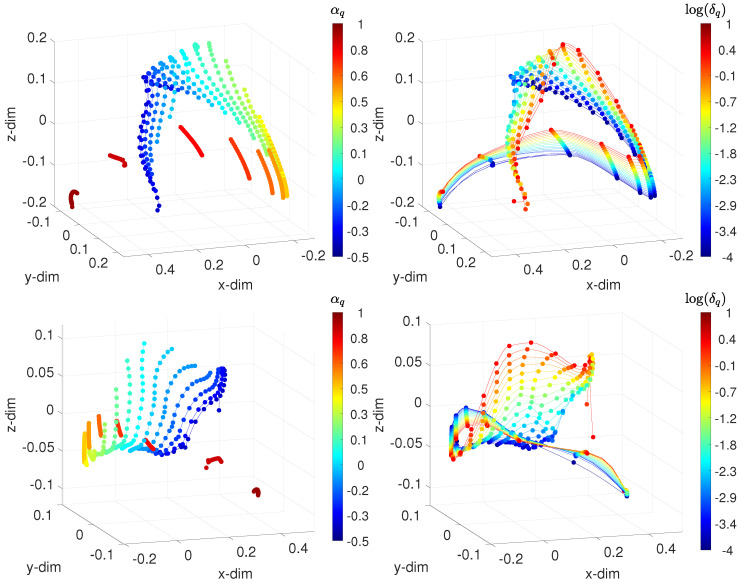
This paper studies the use of multidimensional scaling (MDS) to assess the performance of fractional-order variable structure controllers (VSCs). The test bed consisted of a revolute planar robotic manipulator. The fractional derivatives required by the VSC can be obtained either by adopting numerical real-time signal processing or by using adequate sensors exhibiting fractional dynamics. Integer (fractional) VCS and fractional (integer) sliding mode combinations with different design parameters were tested. Two performance indices based in the time and frequency domains were adopted to compare the system states. The MDS generated the loci of objects corresponding to the tested cases, and the patterns were interpreted as signatures of the system behavior. Numerical experiments illustrated the feasibility and effectiveness of the approach for assessing and visualizing VSC systems.
Keywords: fractional calculus; fractional sensor; information visualization; multidimensional scaling; robot manipulator; variable structure control.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







Similar articles
-
Performance analysis of two-degree of freedom fractional order PID controllers for robotic manipulator with payload.ISA Trans. 2015 Sep;58:279-91. doi: 10.1016/j.isatra.2015.03.013. Epub 2015 Apr 18. ISA Trans. 2015. PMID: 25896827
-
Fractional order PID for tracking control of a parallel robotic manipulator type delta.ISA Trans. 2018 Aug;79:172-188. doi: 10.1016/j.isatra.2018.04.010. Epub 2018 May 21. ISA Trans. 2018. PMID: 29793737
-
Multidimensional scaling locus of memristor and fractional order elements.J Adv Res. 2020 Jan 20;25:147-157. doi: 10.1016/j.jare.2020.01.004. eCollection 2020 Sep. J Adv Res. 2020. PMID: 32922982 Free PMC article. Review.
-
Fractal and Entropy Analysis of the Dow Jones Index Using Multidimensional Scaling.Entropy (Basel). 2020 Oct 8;22(10):1138. doi: 10.3390/e22101138. Entropy (Basel). 2020. PMID: 33286907 Free PMC article.
-
A Review of Recent Advances in Fractional-Order Sensing and Filtering Techniques.Sensors (Basel). 2021 Sep 2;21(17):5920. doi: 10.3390/s21175920. Sensors (Basel). 2021. PMID: 34502811 Free PMC article. Review.
Cited by
-
In memory of Professor José António Tenreiro Machado (1957-2021).Nonlinear Dyn. 2022;107(3):1791-1800. doi: 10.1007/s11071-021-07162-z. Epub 2022 Jan 5. Nonlinear Dyn. 2022. PMID: 35002077 Free PMC article. No abstract available.
-
Improving Mobile Robot Maneuver Performance Using Fractional-Order Controller.Sensors (Basel). 2023 Mar 16;23(6):3191. doi: 10.3390/s23063191. Sensors (Basel). 2023. PMID: 36991899 Free PMC article.
References
-
- Utkin V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control. 1977;22:212–222. doi: 10.1109/TAC.1977.1101446. - DOI
-
- Utkin V., Poznyak A., Orlov Y., Polyakov A. Conventional and high order sliding-mode control. J. Frankl. Inst. 2020;357:10244–10261. doi: 10.1016/j.jfranklin.2020.06.018. - DOI
-
- Shi J., Liu H., Bajçinca N. Robust control of robotic manipulators based on integral sliding mode. Int. J. Control. 2008;81:1537–1548. doi: 10.1080/00207170701749881. - DOI
-
- Gao W., Hung J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993;40:45–55.
-
- Veselỳ V. Decentralized variable structure control of complex systems. Int. J. Syst. Sci. 1998;29:311–321. doi: 10.1080/00207729808929524. - DOI
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
