

Ankle resistance with a unilateral soft exosuit increases plantarflexor effort during pushoff in unimpaired individuals
- PMID: 34961521
- PMCID: PMC8711150
- DOI: 10.1186/s12984-021-00966-5
Ankle resistance with a unilateral soft exosuit increases plantarflexor effort during pushoff in unimpaired individuals
Abstract
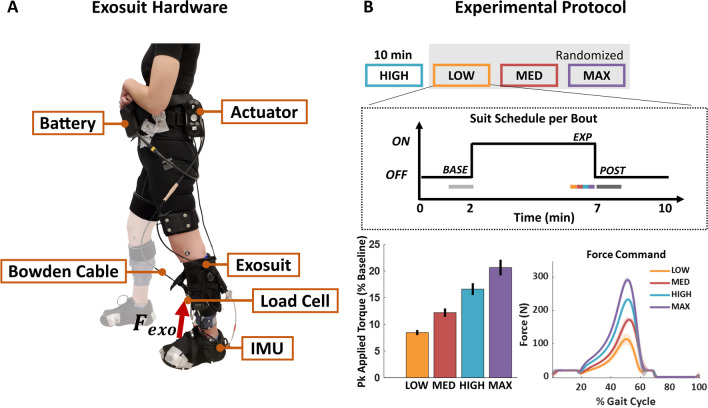
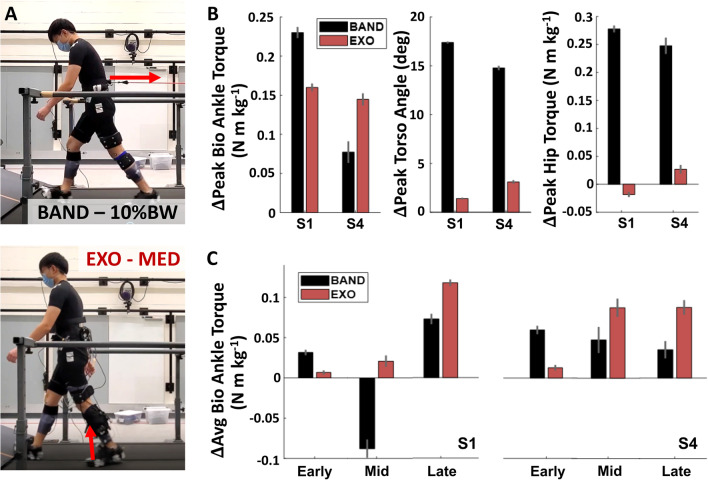
Background: Ankle-targeting resistance training for improving plantarflexion function during walking increases rehabilitation intensity, an important factor for motor recovery after stroke. However, understanding of the effects of resisting plantarflexion during stance on joint kinetics and muscle activity-key outcomes in evaluating its potential value in rehabilitation-remains limited. This initial study uses a unilateral exosuit that resists plantarflexion during mid-late stance in unimpaired individuals to test the hypotheses that when plantarflexion is resisted, individuals would (1) increase plantarflexor ankle torque and muscle activity locally at the resisted ipsilateral ankle, but (2) at higher forces, exhibit a generalized response that also uses the unresisted joints and limb. Further, we expected (3) short-term retention into gait immediately after removal of resistance.
Methods: Ten healthy young adults walked at 1.25 m s-1 for four 10-min discrete bouts, each comprising baseline, exposure to active exosuit-applied resistance, and post-active sections. In each bout, a different force magnitude was applied based on individual baseline ankle torques. The peak resistance torque applied by the exosuit was 0.13 ± 0.01, 0.19 ± 0.01, 0.26 ± 0.02, and 0.32 ± 0.02 N m kg-1, in the LOW, MED, HIGH, and MAX bouts, respectively.
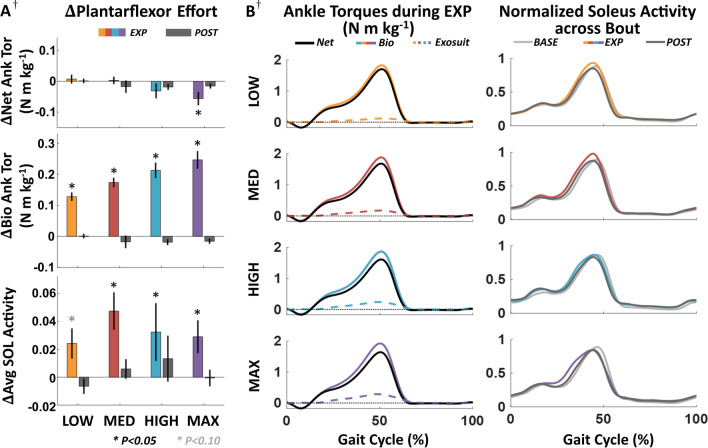
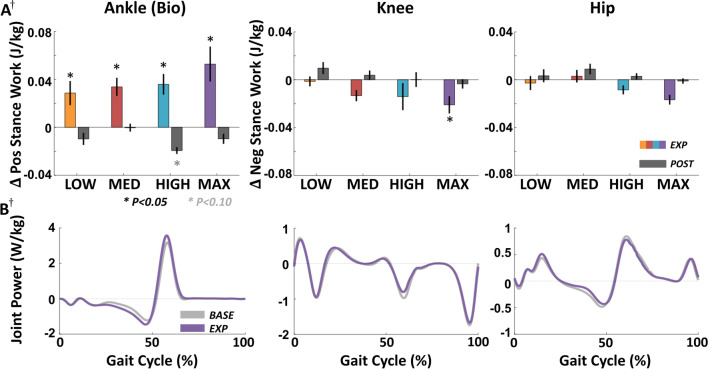
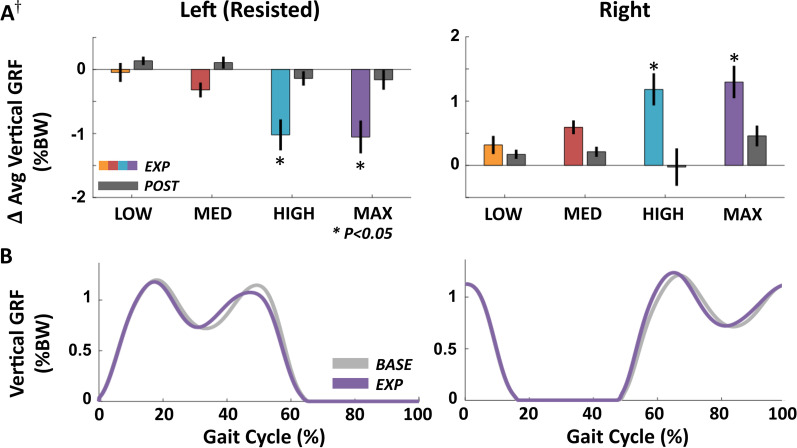
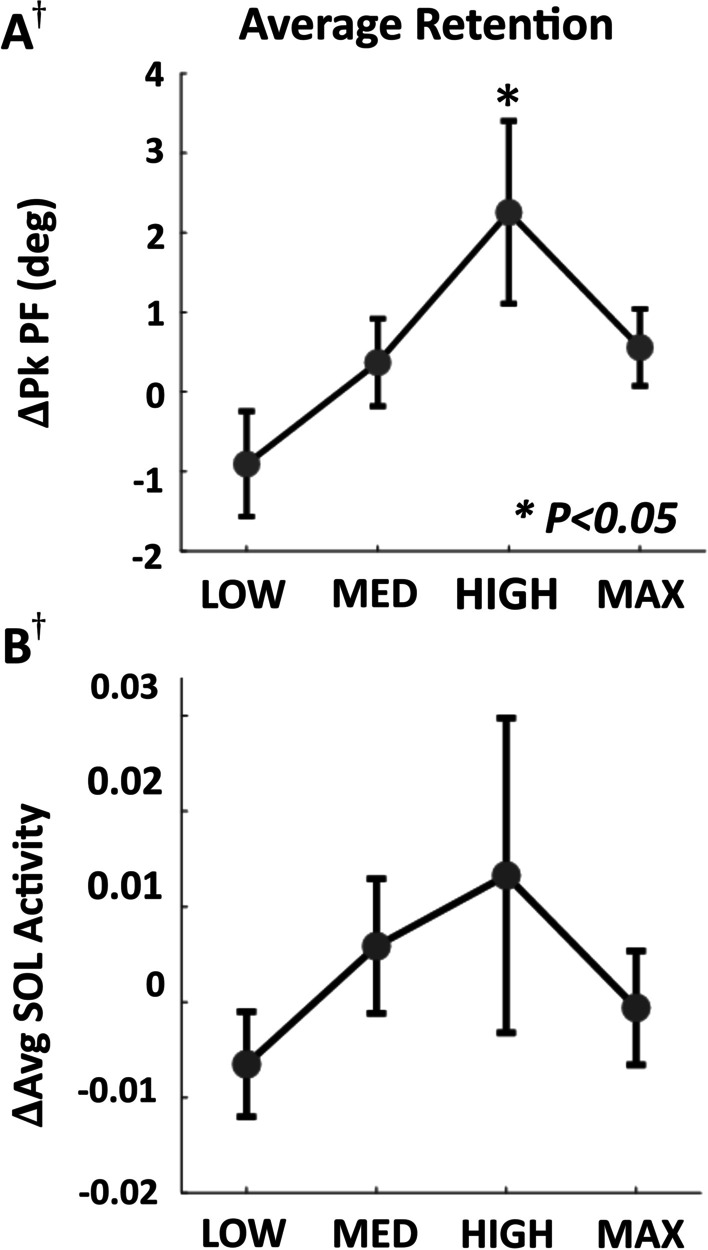
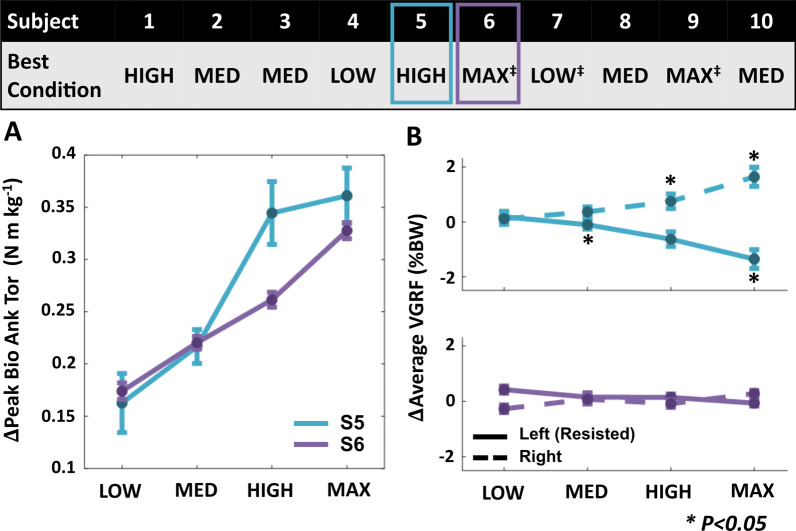
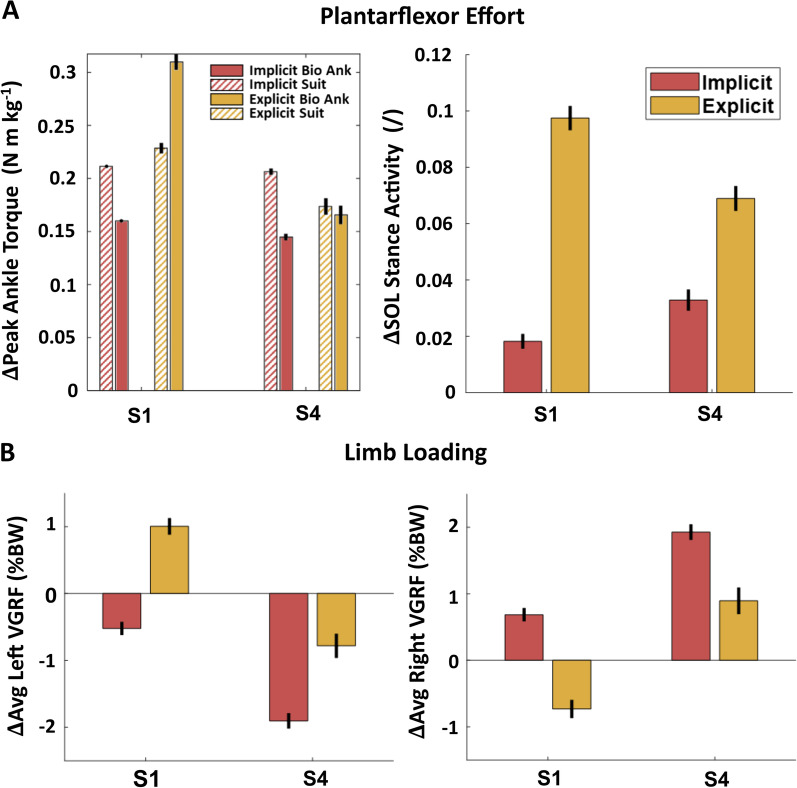
Results: (1) Across all bouts, participants increased peak ipsilateral biological ankle torque by 0.13-0.25 N m kg-1 (p < 0.001) during exosuit-applied resistance compared to corresponding baselines. Additionally, ipsilateral soleus activity during stance increased by 5.4-11.3% (p < 0.05) in all but the LOW bout. (2) In the HIGH and MAX bouts, vertical ground reaction force decreased on the ipsilateral limb while increasing on the contralateral limb (p < 0.01). Secondary analysis found that the force magnitude that maximized increases in biological ankle torque without significant changes in limb loading varied by subject. (3) Finally, peak ipsilateral plantarflexion angle increased significantly during post-exposure in the intermediate HIGH resistance bout (p < 0.05), which corresponded to the greatest average increase in soleus activity (p > 0.10).
Conclusions: Targeted resistance of ankle plantarflexion during stance by an exosuit consistently increased local ipsilateral plantarflexor effort during active resistance, but force magnitude will be an important parameter to tune for minimizing the involvement of the unresisted joints and limb during training.
Keywords: Gait biomechanics; Locomotor adaptation; Resistance training; Soft exosuit.
© 2021. The Author(s).
Conflict of interest statement
Patents describing the exosuit components documented in this article have been filed with the U.S. Patent Office of which CJW and SL are inventors of some or all of the following patent/patent applications: U.S. 9,351,900, U.S. 14/660,704, U.S. 15/097,744, U.S. 14/893,934, PCT/US2014/068462, PCT/US2015/051107, and PCT/US2017/042286, U.S. 10,434,030, U.S. 647 10,843,332, U.S. 10,427,293 filed by Harvard University. Harvard University has entered into a licensing and collaboration agreement with ReWalk Robotics. CJW is a paid consultant for ReWalk Robotics. The other authors declare that they have no competing interests.
Figures
Similar articles
-
Ankle-targeted exosuit resistance increases paretic propulsion in people post-stroke.J Neuroeng Rehabil. 2023 Jun 30;20(1):85. doi: 10.1186/s12984-023-01204-w. J Neuroeng Rehabil. 2023. PMID: 37391851 Free PMC article.
-
Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking.J Neuroeng Rehabil. 2018 Jul 13;15(1):66. doi: 10.1186/s12984-018-0410-y. J Neuroeng Rehabil. 2018. PMID: 30001726 Free PMC article.
-
Ankle and knee biomechanics during normal walking following ankle plantarflexor fatigue.J Electromyogr Kinesiol. 2017 Aug;35:24-29. doi: 10.1016/j.jelekin.2017.05.007. Epub 2017 May 30. J Electromyogr Kinesiol. 2017. PMID: 28587934
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
The heel-raise test for ankle plantarflexor strength: a scoping review and meta-analysis of studies providing norms.J Phys Ther Sci. 2022 Jul;34(7):528-531. doi: 10.1589/jpts.34.528. Epub 2022 Jul 1. J Phys Ther Sci. 2022. PMID: 35784604 Free PMC article.
Cited by
-
Ankle-targeted exosuit resistance increases paretic propulsion in people post-stroke.J Neuroeng Rehabil. 2023 Jun 30;20(1):85. doi: 10.1186/s12984-023-01204-w. J Neuroeng Rehabil. 2023. PMID: 37391851 Free PMC article.
-
Assistance force-line of exosuit affects ankle multidimensional motion: a theoretical and experimental study.J Neuroeng Rehabil. 2024 May 28;21(1):87. doi: 10.1186/s12984-024-01386-x. J Neuroeng Rehabil. 2024. PMID: 38807221 Free PMC article.
-
Can a passive unilateral hip exosuit diminish walking asymmetry? A randomized trial.J Neuroeng Rehabil. 2023 Jul 12;20(1):88. doi: 10.1186/s12984-023-01212-w. J Neuroeng Rehabil. 2023. PMID: 37438846 Free PMC article. Clinical Trial.
-
Effects of a soft robotic exosuit on the quality and speed of overground walking depends on walking ability after stroke.J Neuroeng Rehabil. 2023 Sep 1;20(1):113. doi: 10.1186/s12984-023-01231-7. J Neuroeng Rehabil. 2023. PMID: 37658408 Free PMC article.
References
-
- Benjamin EJ, Virani SS, Callaway CW, Chamberlain AM, Chang AR, Cheng S, et al. Heart disease and stroke statistics—2017 update. Circulation. 2017;135:146–603.
-
- Olney SJ, Richards C. Hemiparetic gait following stroke. Part I: Characteristics. Gait Posture. 1996;4(2):136–148.
-
- Lin PY, Yang YR, Cheng SJ, Wang RY. The relation between ankle impairments and gait velocity and symmetry in people with stroke. Arch Phys Med Rehabil. 2006;87(4):562–568. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
