

Intrinsic and environmental factors modulating autonomous robotic search under high uncertainty
- PMID: 34972831
- PMCID: PMC8720098
- DOI: 10.1038/s41598-021-03826-3
Intrinsic and environmental factors modulating autonomous robotic search under high uncertainty
Abstract
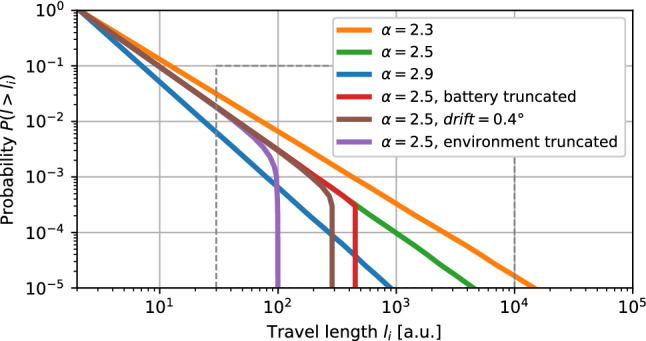
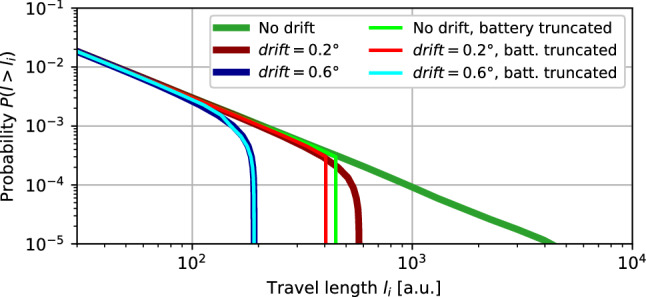
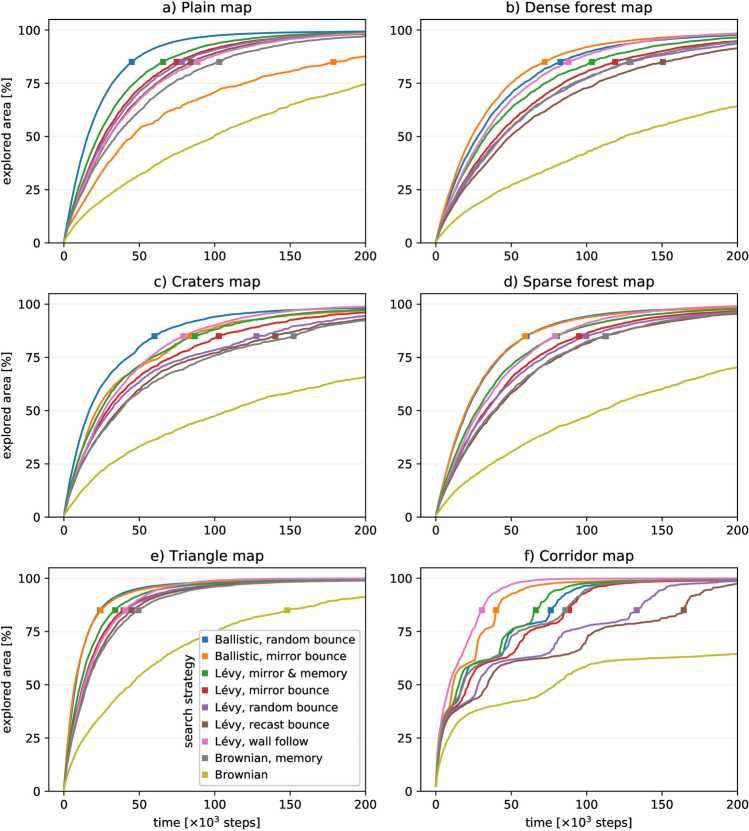
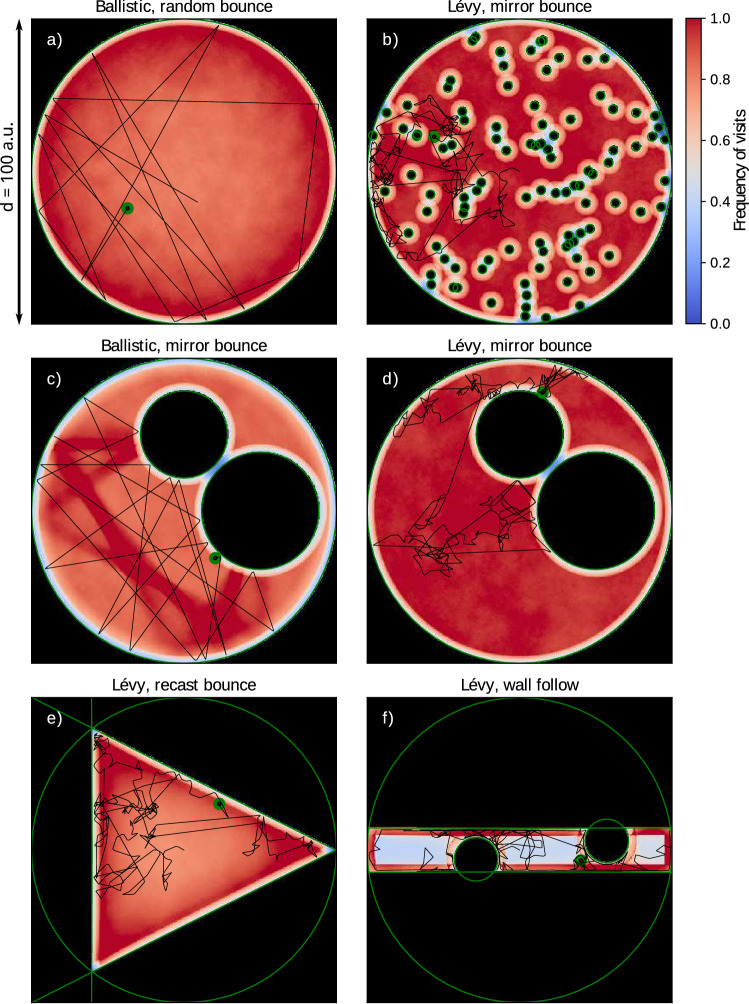
Autonomous robotic search problems deal with different levels of uncertainty. When uncertainty is low, deterministic strategies employing available knowledge result in most effective searches. However, there are domains where uncertainty is always high since information about robot location, environment boundaries or precise reference points is unattainable, e.g., in cave, deep ocean, planetary exploration, or upon sensor or communications impairment. Furthermore, latency regarding when search targets move, appear or disappear add to uncertainty sources. Here we study intrinsic and environmental factors that affect low-informed robotic search based on diffusive Brownian, naive ballistic, and superdiffusive strategies (Lévy walks), and in particular, the effectiveness of their random exploration. Representative strategies were evaluated considering both intrinsic (motion drift, energy or memory limitations) and extrinsic factors (obstacles and search boundaries). Our results point towards minimum-knowledge based modulation approaches that can adjust distinct spatial and temporal aspects of random exploration to lead to effective autonomous search under uncertainty.
© 2021. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures


References
-
- Bartumeus F, da Luz MGE, Viswanathan GM, Catalan J. Animal search strategies: A quantitative random-walk analysis. Ecology. 2005;86:3078–3087. doi: 10.1890/04-1806. - DOI
-
- Mendez, V., Campos, D. & Bartumeus, F. Stochastic Foundations in Movement Ecology (Springer, 2014).
-
- Bearup D, Benefer CM, Petrovskii SV, Blackshaw RP. Revisiting Brownian motion as a description of animal movement: A comparison to experimental movement data. Methods Ecol. Evol. 2016;7:1525–1537. doi: 10.1111/2041-210X.12615. - DOI
-
- Jandhyala, V. K. & Fotopoulos, S. B. Applications of random search methods to foraging in ecological environments and other natural phenomena—A review. Environmetrics29, e2451, 10.1002/env.2451 (2018). E2451 env-16-0136.
Publication types
LinkOut - more resources
Full Text Sources
