

Adaptation Strategies for Personalized Gait Neuroprosthetics
- PMID: 34975445
- PMCID: PMC8716811
- DOI: 10.3389/fnbot.2021.750519
Adaptation Strategies for Personalized Gait Neuroprosthetics
Abstract
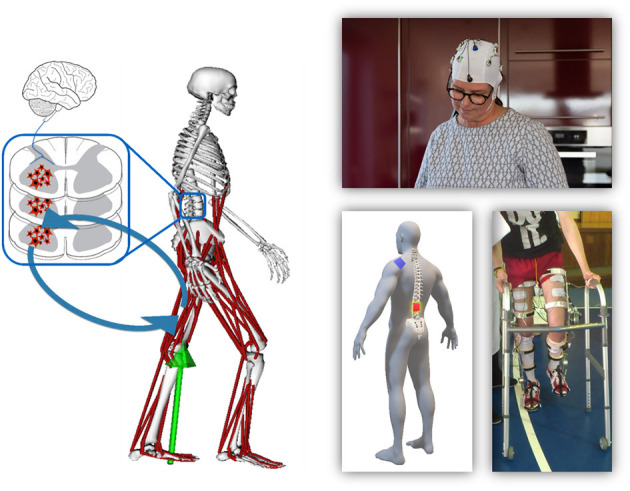
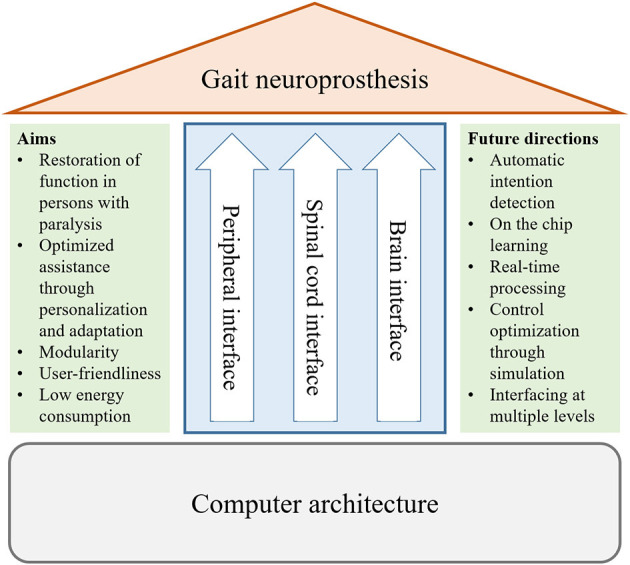
Personalization of gait neuroprosthetics is paramount to ensure their efficacy for users, who experience severe limitations in mobility without an assistive device. Our goal is to develop assistive devices that collaborate with and are tailored to their users, while allowing them to use as much of their existing capabilities as possible. Currently, personalization of devices is challenging, and technological advances are required to achieve this goal. Therefore, this paper presents an overview of challenges and research directions regarding an interface with the peripheral nervous system, an interface with the central nervous system, and the requirements of interface computing architectures. The interface should be modular and adaptable, such that it can provide assistance where it is needed. Novel data processing technology should be developed to allow for real-time processing while accounting for signal variations in the human. Personalized biomechanical models and simulation techniques should be developed to predict assisted walking motions and interactions between the user and the device. Furthermore, the advantages of interfacing with both the brain and the spinal cord or the periphery should be further explored. Technological advances of interface computing architecture should focus on learning on the chip to achieve further personalization. Furthermore, energy consumption should be low to allow for longer use of the neuroprosthesis. In-memory processing combined with resistive random access memory is a promising technology for both. This paper discusses the aforementioned aspects to highlight new directions for future research in gait neuroprosthetics.
Keywords: embedded artificial intelligence; neural interface; neuroprosthesis; personalized devices; perspective; resistive random access memory.
Copyright © 2021 Koelewijn, Audu, del-Ama, Colucci, Font-Llagunes, Gogeascoechea, Hnat, Makowski, Moreno, Nandor, Quinn, Reichenbach, Reyes, Sartori, Soekadar, Triolo, Vermehren, Wenger, Yavuz, Fey and Beckerle.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
References
-
- Ajiboye A. B., Willett F. R., Young D. R., Memberg W. D., Murphy B. A., Miller J. P., et al. . (2017). Restoration of reaching and grasping movements through brain-controlled muscle stimulation in a person with tetraplegia: a proof-of-concept demonstration. Lancet 389, 1821–1830. 10.1016/S0140-6736(17)30601-3 - DOI - PMC - PubMed
-
- Alibeji N., Kirsch N., Sharma N. (2017). An adaptive low-dimensional control to compensate for actuator redundancy and fes-induced muscle fatigue in a hybrid neuroprosthesis. Control Eng. Pract. 59, 204–219. 10.1016/j.conengprac.2016.07.015 - DOI
-
- Alonso J., Romero F., Pàmies-Vilà R., Lugrís U., Font-Llagunes J. M. (2012). A simple approach to estimate muscle forces and orthosis actuation in powered assisted walking of spinal cord-injured subjects. Multibody Syst. Dyn. 28, 109–124. 10.1007/s11044-011-9284-5 - DOI