

A Modular Digital Twinning Framework for Safety Assurance of Collaborative Robotics
- PMID: 34977162
- PMCID: PMC8719333
- DOI: 10.3389/frobt.2021.758099
A Modular Digital Twinning Framework for Safety Assurance of Collaborative Robotics
Abstract
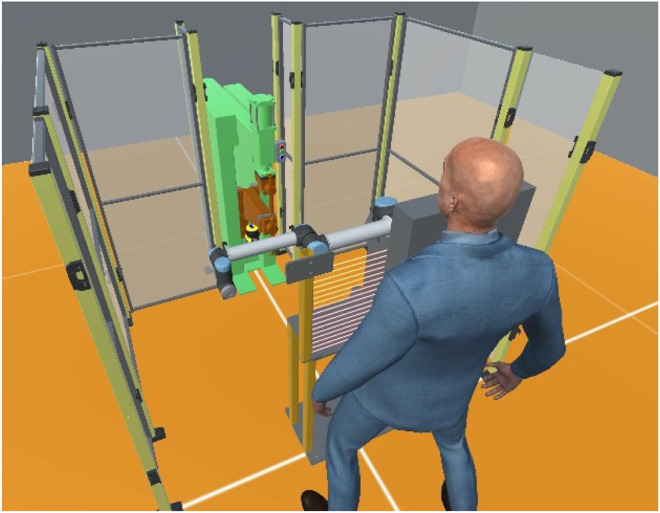
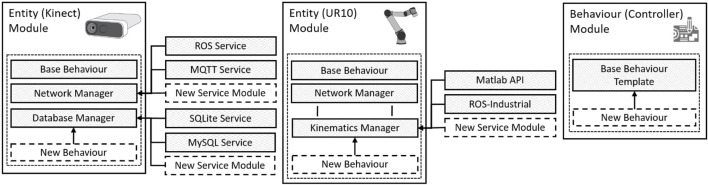
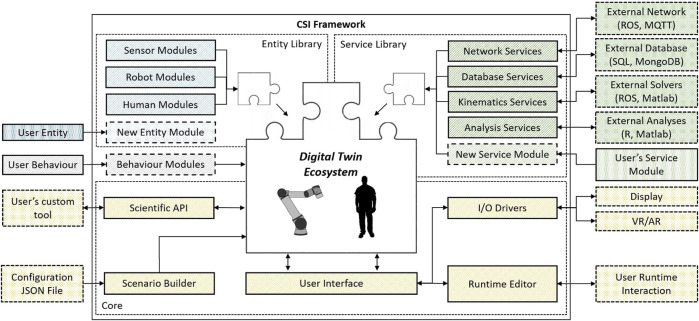
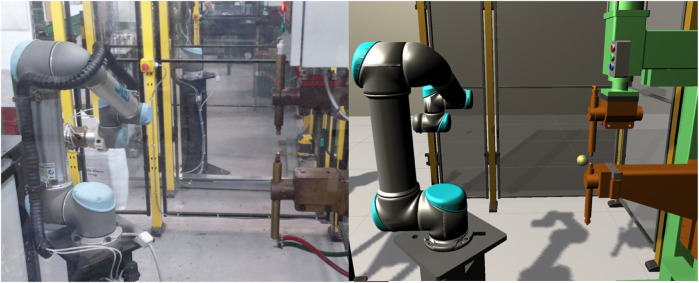
Digital twins offer a unique opportunity to design, test, deploy, monitor, and control real-world robotic processes. In this paper we present a novel, modular digital twinning framework developed for the investigation of safety within collaborative robotic manufacturing processes. The modular architecture supports scalable representations of user-defined cyber-physical environments, and tools for safety analysis and control. This versatile research tool facilitates the creation of mixed environments of Digital Models, Digital Shadows, and Digital Twins, whilst standardising communication and physical system representation across different hardware platforms. The framework is demonstrated as applied to an industrial case-study focused on the safety assurance of a collaborative robotic manufacturing process. We describe the creation of a digital twin scenario, consisting of individual digital twins of entities in the manufacturing case study, and the application of a synthesised safety controller from our wider work. We show how the framework is able to provide adequate evidence to virtually assess safety claims made against the safety controller using a supporting validation module and testing strategy. The implementation, evidence and safety investigation is presented and discussed, raising exciting possibilities for the use of digital twins in robotic safety assurance.
Keywords: automated code generation; collaborative robot safety; digital twins; human-robot collaboration; modular framework; probabilistic model checking; risk-informed software synthesis; robotics.
Copyright © 2021 Douthwaite, Lesage, Gleirscher, Calinescu, Aitken, Alexander and Law.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures


References
-
- Agnusdei G. P., Elia V., Gnoni M. G. (2021a). A Classification Proposal of Digital Twin Applications in the Safety Domain. Comput. Ind. Eng. 154, 107137. 10.1016/j.cie.2021.107137 - DOI
-
- Agnusdei G. P., Elia V., Gnoni M. G. (2021b). Is Digital Twin Technology Supporting Safety Management? A Bibliometric and Systematic Review. Appl. Sci. 11, 2767–2817. 10.3390/app11062767 - DOI
-
- Aitken J. M., Veres S. M., Judge M. (2014). Adaptation of System Configuration under the Robot Operating System. IFAC Proc. 47, 4484–4492. 10.3182/20140824-6-za-1003.02531 - DOI
-
- Alexander R., Hawkins H., Rae A. (2015). Situation Coverage-A Coverage Criterion for Testing Autonomous Robots. Report number YCS-2015-496. Department of Computer Science, University of York.
-
- Basin D., Klaedtke F., Müller S., Zălinescu E. (2015). Monitoring Metric First-Order Temporal Properties. J. ACM 62, 1–45. 10.1145/2699444 - DOI
LinkOut - more resources
Full Text Sources