

Adaptive transfer alignment method based on the observability analysis for airborne pod strapdown inertial navigation system
- PMID: 35042924
- PMCID: PMC8766501
- DOI: 10.1038/s41598-021-04732-4
Adaptive transfer alignment method based on the observability analysis for airborne pod strapdown inertial navigation system
Erratum in
-
Author Correction: Adaptive transfer alignment method based on the observability analysis for airborne pod strapdown inertial navigation system.Sci Rep. 2022 Mar 23;12(1):4996. doi: 10.1038/s41598-022-09223-8. Sci Rep. 2022. PMID: 35322176 Free PMC article. No abstract available.
Abstract
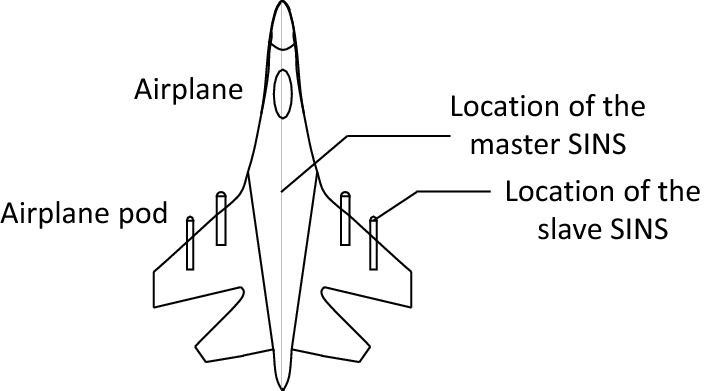
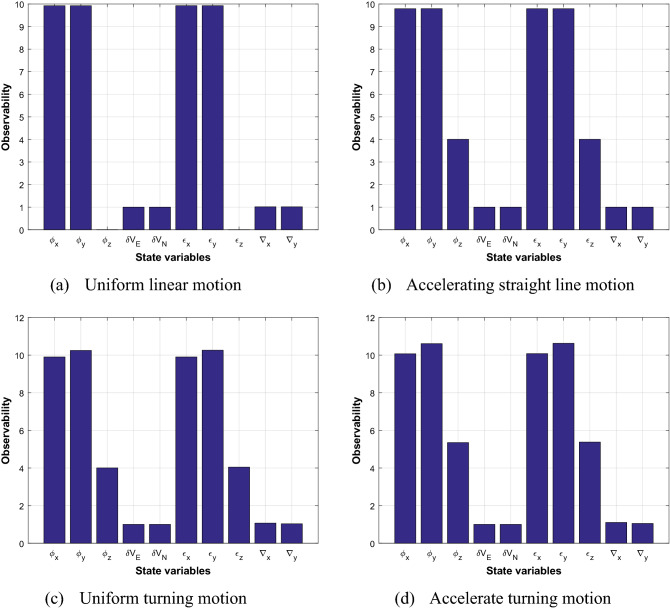
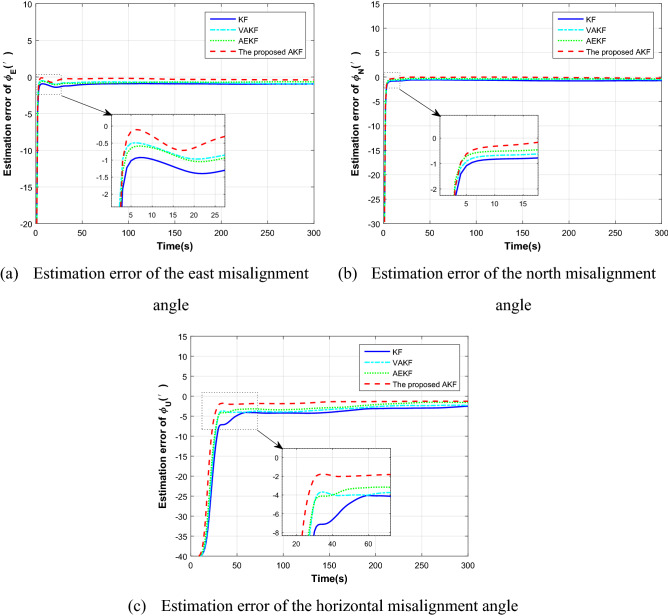
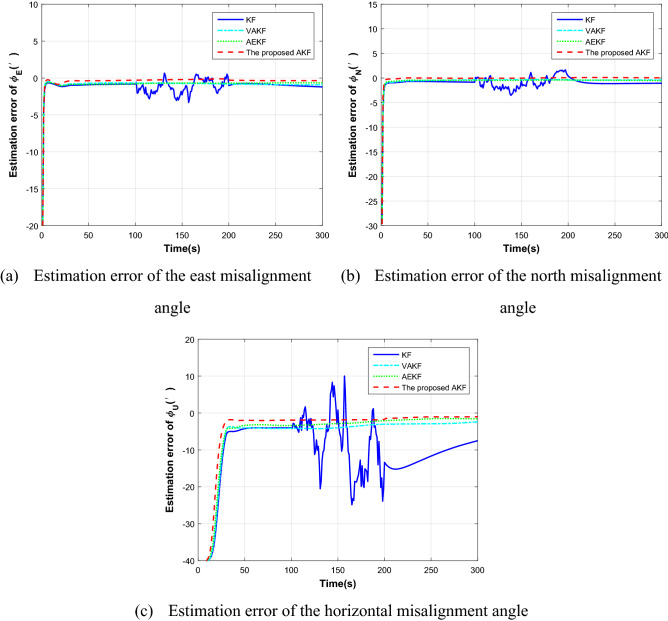
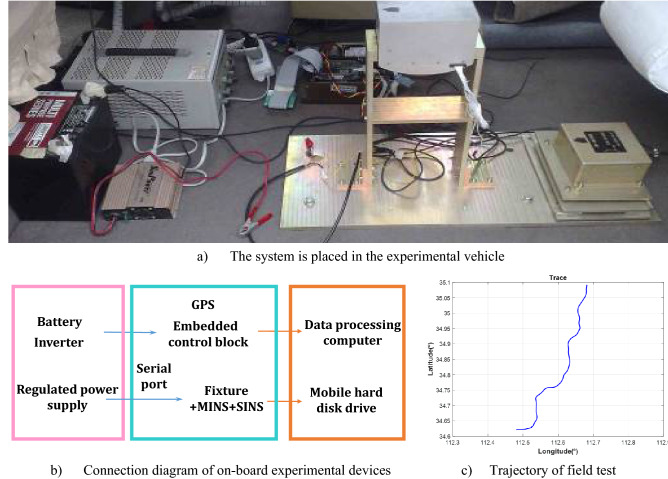
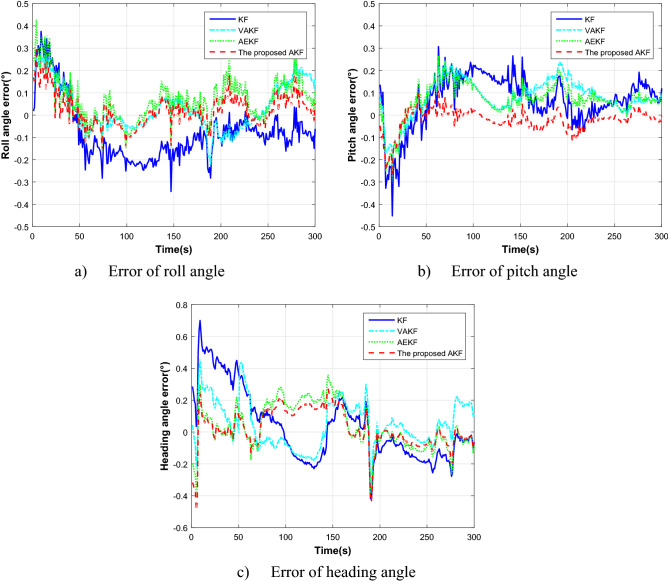
For the airborne pod strapdown inertial navigation system, it is necessary to use the host aircraft's inertial navigation system for the transfer alignment as quickly and accurately as possible in the flight process of the aircraft. The purpose of this paper is to propose an adaptive transfer alignment method based on the observability analysis for the strapdown inertial navigation system, which is able to meet the practical need of maintaining the navigation accuracy of the airborne pod. The observability of each state variable is obtained by observability analysis of system state variables. According to the weight of the observability, a transfer alignment filter algorithm based on adaptive adjustment factor is constructed to reduce the influence of weak observability state variables on the whole filter, which can improve the estimation accuracy of transfer alignment. Simulations and experiment tests of the airborne pod and the master strapdown inertial navigation systems show that the adaptive transfer alignment method based on the observability analysis can overcome the shortage of the weak observability state variables, so as to improve the alignment and the navigation performance in practical applications, thus improving the adaptability of the airborne pod.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Chen X, Ma Z, Yang P. Integrated modeling of motion decoupling and flexure deformation of carrier in transfer alignment. Mech. Syst. Signal Process. 2021;159:107690. doi: 10.1016/j.ymssp.2021.107690. - DOI
-
- Lu J, Ye L, Luo W, et al. Vehicle-borne non-strapdown transfer alignment method and application with poor attitude observation information. Measurement. 2021;176:109234. doi: 10.1016/j.measurement.2021.109234. - DOI
-
- Min, F., Xu, X., et al. Research on the algorithm of initial alignment for new generation air-to-air missile. In: The 32nd China Conference on control and decision making (2020)
-
- Huang, H.S., Fan, L.M. Gyro-stabilized platform design for airborne pod based on Elmo digital servo controller. Elect. Des. Eng. (2010)
-
- Pan, P.J., Liu, J.Y., Zeng, Q.H., et al. Image matching for target location in airborne optoelectronic pod. In: Guidance, Navigation and Control Conference. IEEE (2017)
Grants and funding
- 61803188/National Natural Science Foundation of China
- 61803188/National Natural Science Foundation of China
- 61803188/National Natural Science Foundation of China
- 61803188/National Natural Science Foundation of China
- 61803188/National Natural Science Foundation of China
- 18KJB413003/Natural Science Foundation of the Jiangsu Higher Education Institutions of China
- 18KJB413003/Natural Science Foundation of the Jiangsu Higher Education Institutions of China
- 18KJB413003/Natural Science Foundation of the Jiangsu Higher Education Institutions of China
- 18KJB413003/Natural Science Foundation of the Jiangsu Higher Education Institutions of China
- 18KJB413003/Natural Science Foundation of the Jiangsu Higher Education Institutions of China
- No. jit-b-201816, No. jit-b-201713, No. jit-b-202029/Talent Introduction Project of Jinling Institute of Technology
- No. jit-b-201816, No. jit-b-201713, No. jit-b-202029/Talent Introduction Project of Jinling Institute of Technology
- No. jit-b-201816, No. jit-b-201713, No. jit-b-202029/Talent Introduction Project of Jinling Institute of Technology
- No. jit-b-201816, No. jit-b-201713, No. jit-b-202029/Talent Introduction Project of Jinling Institute of Technology
- No. jit-b-201816, No. jit-b-201713, No. jit-b-202029/Talent Introduction Project of Jinling Institute of Technology
- 2019/5th 333 High-level Talent Training Project in Jiangsu Province
- 2019/5th 333 High-level Talent Training Project in Jiangsu Province
- 2019/5th 333 High-level Talent Training Project in Jiangsu Province
- 2019/5th 333 High-level Talent Training Project in Jiangsu Province
- 2019/5th 333 High-level Talent Training Project in Jiangsu Province
LinkOut - more resources
Full Text Sources
