

Configuring ADAS Platforms for Automotive Applications Using Metaheuristics
- PMID: 35059441
- PMCID: PMC8765337
- DOI: 10.3389/frobt.2021.762227
Configuring ADAS Platforms for Automotive Applications Using Metaheuristics
Abstract
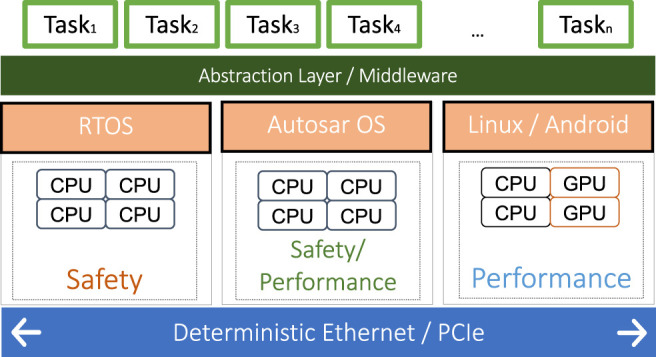
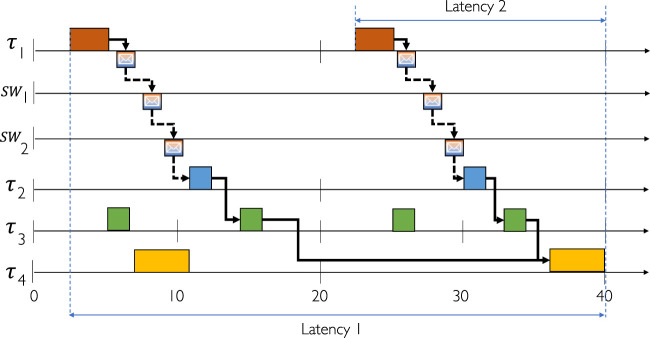
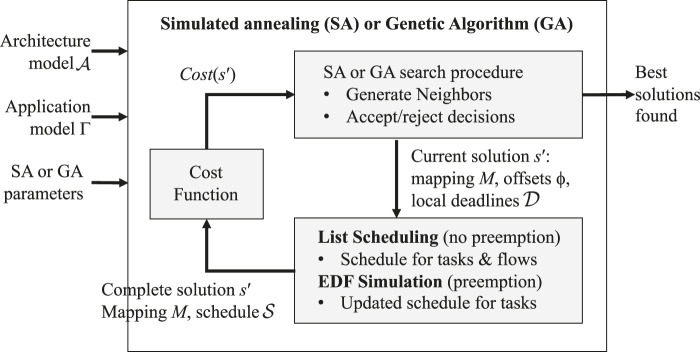
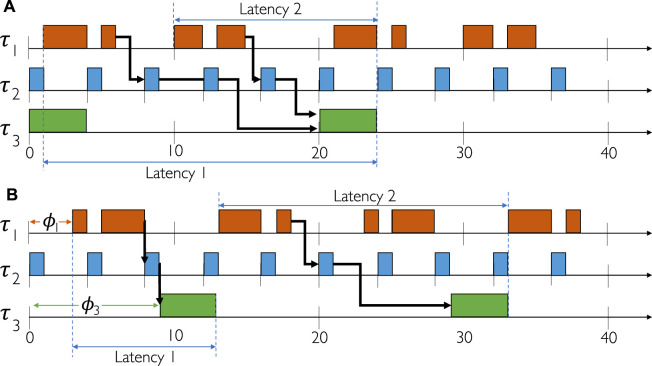
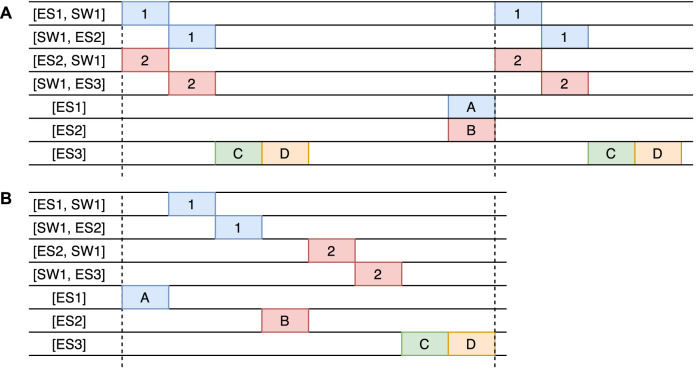
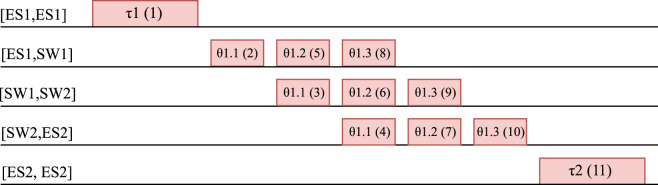
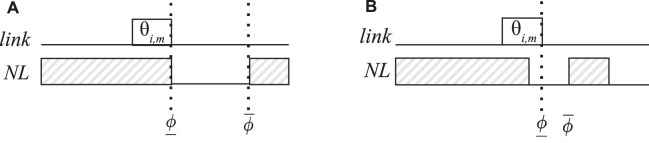
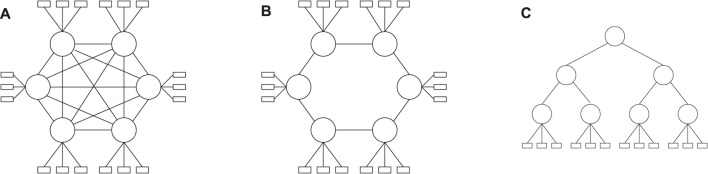
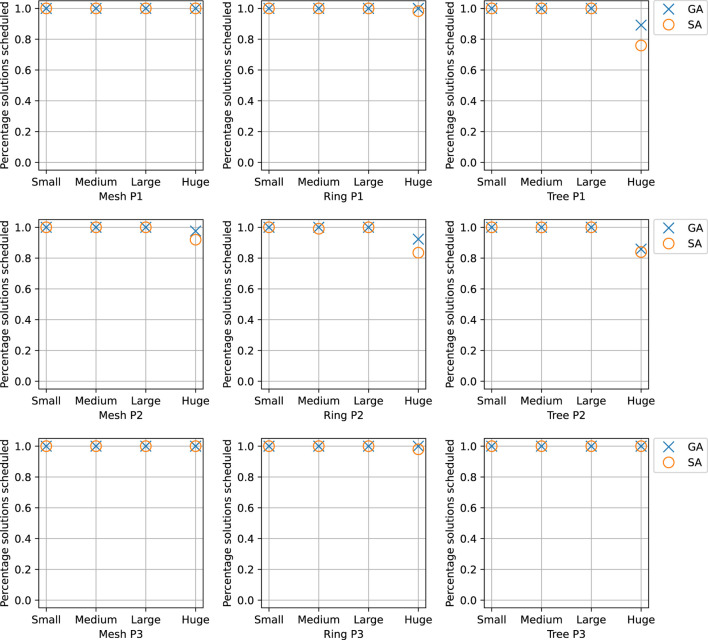
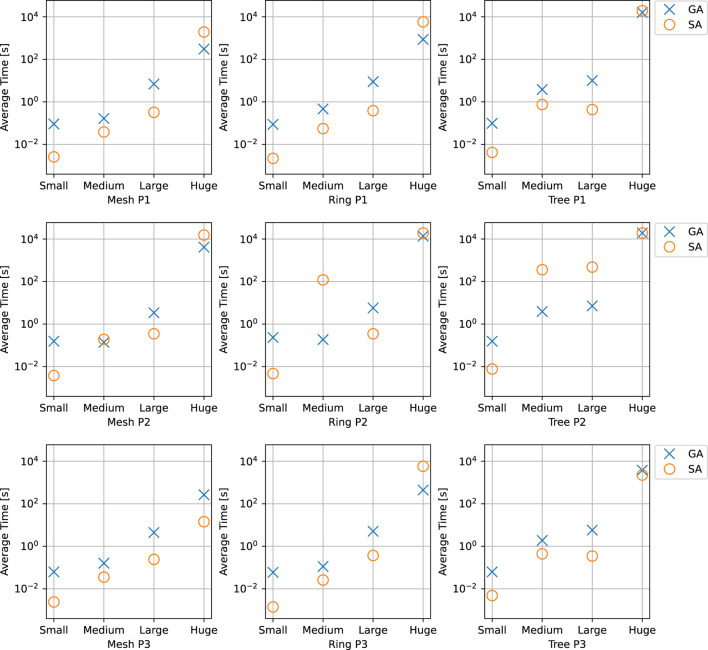
Modern Advanced Driver-Assistance Systems (ADAS) combine critical real-time and non-critical best-effort tasks and messages onto an integrated multi-core multi-SoC hardware platform. The real-time safety-critical software tasks have complex interdependencies in the form of end-to-end latency chains featuring, e.g., sensing, processing/sensor fusion, and actuating. The underlying real-time operating systems running on top of the multi-core platform use static cyclic scheduling for the software tasks, while the communication backbone is either realized through PCIe or Time-Sensitive Networking (TSN). In this paper, we address the problem of configuring ADAS platforms for automotive applications, which means deciding the mapping of tasks to processing cores and the scheduling of tasks and messages. Time-critical messages are transmitted in a scheduled manner via the timed-gate mechanism described in IEEE 802.1Qbv according to the pre-computed Gate Control List (GCL) schedule. We study the computation of the assignment of tasks to the available platform CPUs/cores, the static schedule tables for the real-time tasks, as well as the GCLs, such that task and message deadlines, as well as end-to-end task chain latencies, are satisfied. This is an intractable combinatorial optimization problem. As the ADAS platforms and applications become increasingly complex, such problems cannot be optimally solved and require problem-specific heuristics or metaheuristics to determine good quality feasible solutions in a reasonable time. We propose two metaheuristic solutions, a Genetic Algorithm (GA) and one based on Simulated Annealing (SA), both creating static schedule tables for tasks by simulating Earliest Deadline First (EDF) dispatching with different task deadlines and offsets. Furthermore, we use a List Scheduling-based heuristic to create the GCLs in platforms featuring a TSN backbone. We evaluate the proposed solution with real-world and synthetic test cases scaled to fit the future requirements of ADAS systems. The results show that our heuristic strategy can find correct solutions that meet the complex timing and dependency constraints at a higher rate than the related work approaches, i.e., the jitter constraints are satisfied in over 6 times more cases, and the task chain constraints are satisfied in 41% more cases on average. Our method scales well with the growing trend of ADAS platforms.
Keywords: IEEE 802.1Qbv; TSN; automotive applications; task preemption; task scheduling; time-sensitive networking.
Copyright © 2022 McLean, Juul Hansen, Pop and Craciunas.
Conflict of interest statement
Author SC was employed by the company TTTech Computertechnik AG. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

References
-
- Abdelzaher T. F., Shin K. G. (1999). Combined Task and Message Scheduling in Distributed Real-Time Systems. IEEE Trans. Parallel Distrib. Syst. 10, 1179–1191. 10.1109/71.809575 - DOI
-
- Aichouch M., Prévotet J.-C., Nouvel F. (2013). “Evaluation of the Overheads and Latencies of a Virtualized RTOS,” in 2013 8th IEEE International Symposium on Industrial Embedded Systems (IEEE; ), 81–84. 10.1109/sies.2013.6601475 - DOI
-
- Barzegaran M., Cervin A., Pop P. (2020). Performance Optimization of Control Applications on Fog Computing Platforms Using Scheduling and Isolation. IEEE Access 8, 104085–104098. 10.1109/access.2020.2999322 - DOI
-
- Becker M., Dasari D., Mubeen S., Behnam M., Nolte T. (2017). End-to-end Timing Analysis of Cause-Effect Chains in Automotive Embedded Systems. J. Syst. Architecture 80, 1. 10.1016/j.sysarc.2017.09.004 - DOI
-
- Becker M., Dasari D., Mubeen S., Behnam M., Nolte T. (2016a). “Synthesizing Job-Level Dependencies for Automotive Multi-Rate Effect Chains,” in 2016 IEEE 22nd International Conference on Embedded and Real-Time Computing Systems and Applications (IEEE; ), 159–169. 10.1109/rtcsa.2016.41 - DOI
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials