

Effects of motion paradigm on human perception of tilt and translation
- PMID: 35082357
- PMCID: PMC8792002
- DOI: 10.1038/s41598-022-05483-6
Effects of motion paradigm on human perception of tilt and translation
Abstract
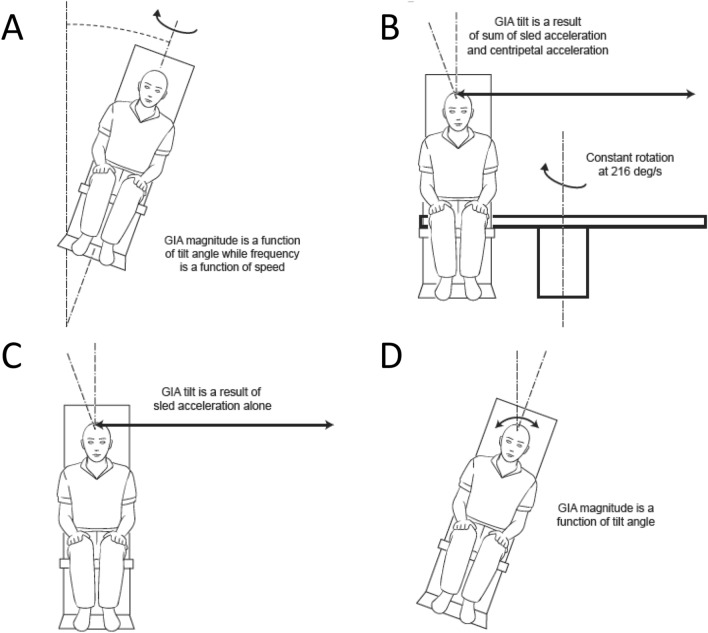
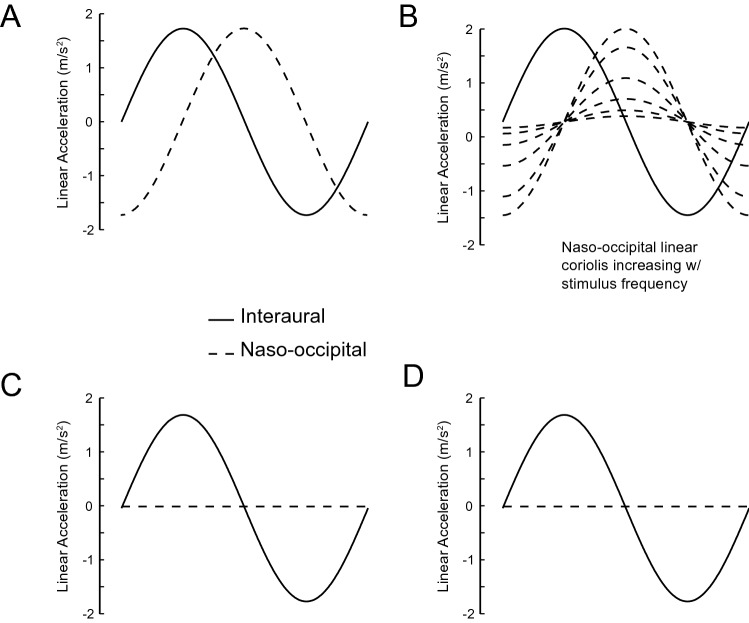
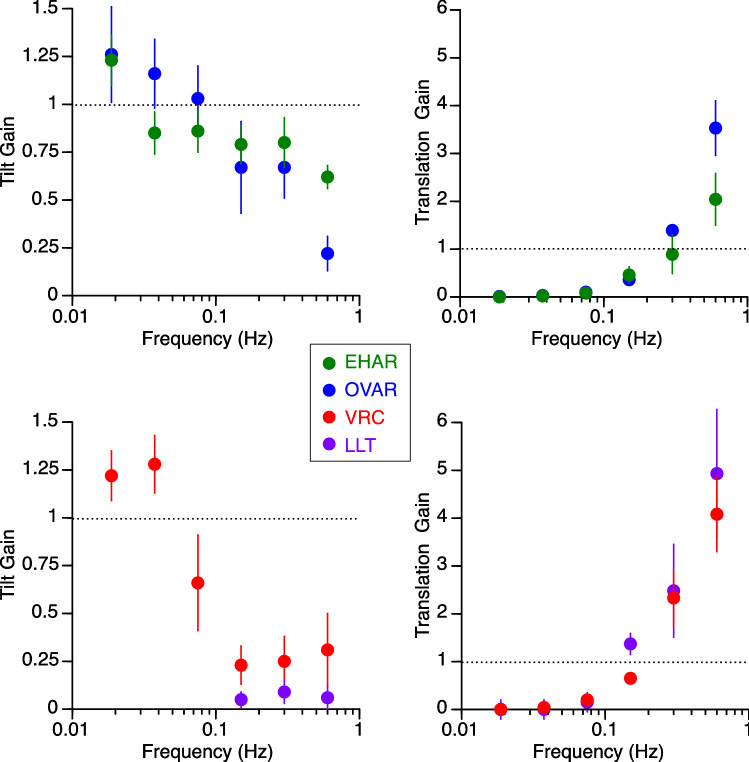
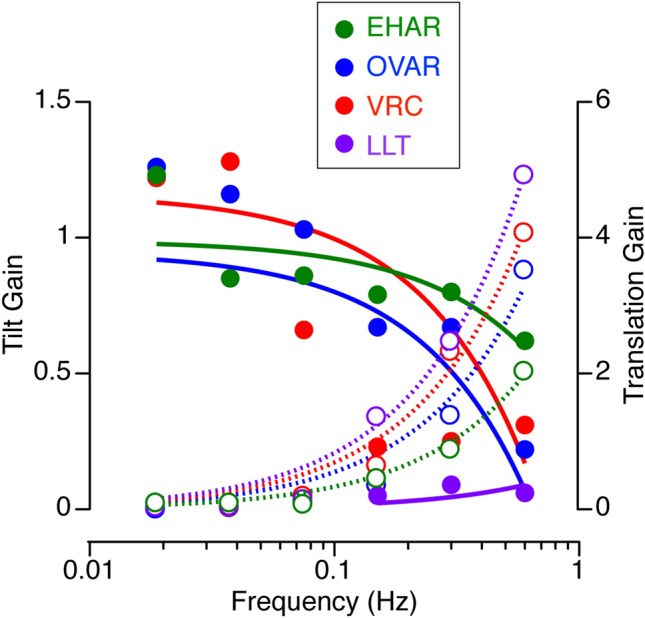
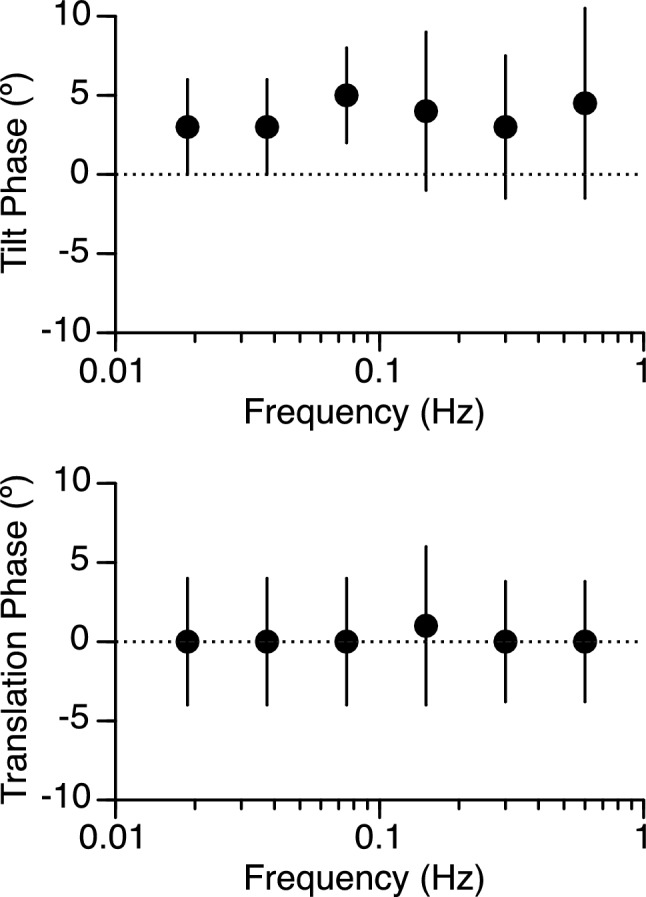
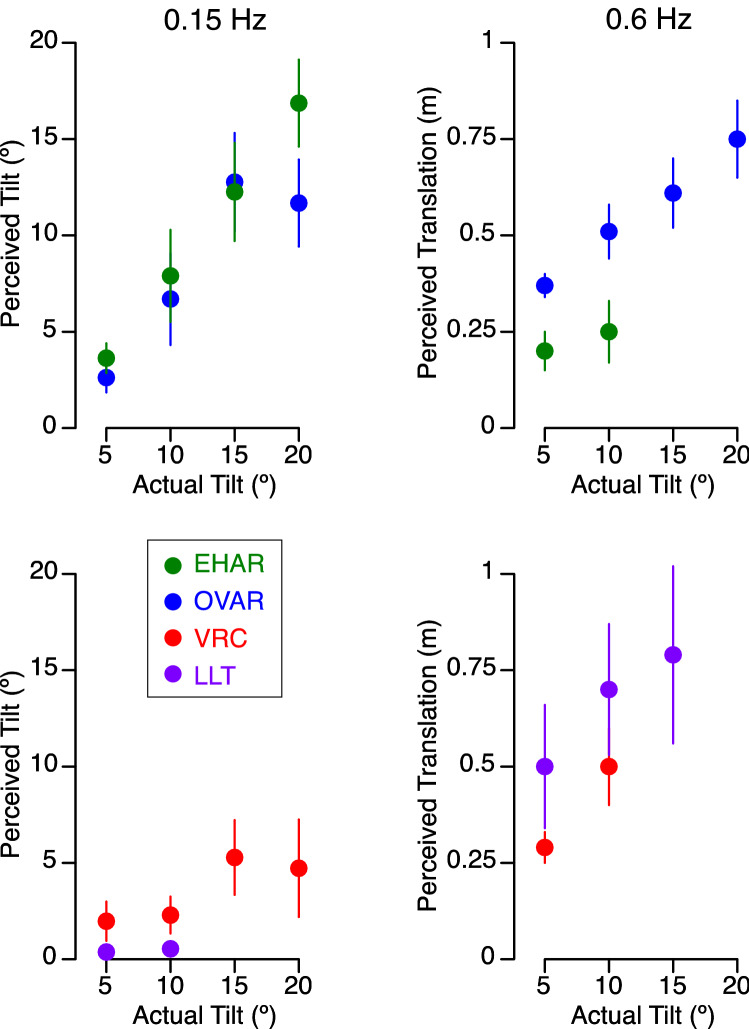
The effect of varying sinusoidal linear acceleration on perception of human motion was examined using 4 motion paradigms: off-vertical axis rotation, variable radius centrifugation, linear lateral translation, and rotation about an earth-horizontal axis. The motion profiles for each paradigm included 6 frequencies (0.01-0.6 Hz) and 5 tilt amplitudes (5°-20°). Subjects verbally reported the perceived angle of their whole-body tilt and the peak-to-peak translation of their head in space and used a joystick capable of recording 2-axis motion in the sagittal and transversal planes to indicate the phase between the perceived and actual motions. The amplitudes of perceived tilt and translation were expressed in terms of gain, i.e., the ratio of perceived tilt to equivalent tilt angle, and the ratio of perceived translation to equivalent linear displacement. Tilt perception gain decreased, whereas translation perception gain increased, with increasing frequency. During off-vertical axis rotation, the phase of tilt perception and of translation perception did not vary across stimulus frequencies. These motion paradigms elicited similar responses in roll tilt and interaural perception of translation, with differences likely due to the influence of naso-occipital linear accelerations and input to the semicircular canals that varied across motion paradigms.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Young, L. R., Henn, V. & Scherberger, H. Fundamentals of the Theory of Movement Perception by Dr. E. Mach (Springer, 2002).
-
- Einstein A. Über das Relativitätsprinzip und die aus demselben gezogenen Folgerungen. Jahrb. Radioakt. 1908;4:411–462.
-
- Makarov SN, Bokhov BB. Effect of skill in underwater orientation on perception of the gravitational vertical. J. Photo Remote Sens. 1972;69:175–176.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
