

Benefits of a microprocessor-controlled prosthetic foot for ascending and descending slopes
- PMID: 35090505
- PMCID: PMC8796559
- DOI: 10.1186/s12984-022-00983-y
Benefits of a microprocessor-controlled prosthetic foot for ascending and descending slopes
Abstract
Background: Prosthetic feet are prescribed for persons with a lower-limb amputation to restore lost mobility. However, due to limited adaptability of their ankles and springs, situations like walking on slopes or uneven ground remain challenging. This study investigated to what extent a microprocessor-controlled prosthetic foot (MPF) facilitates walking on slopes.
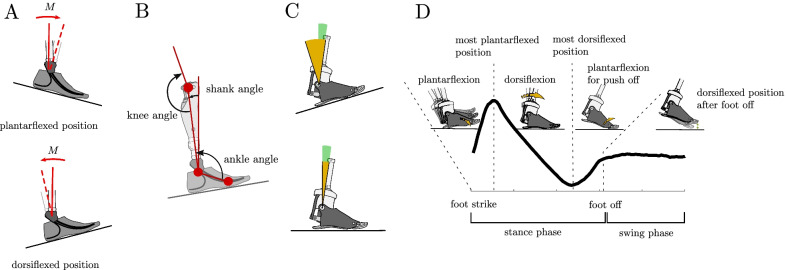
Methods: Seven persons each with a unilateral transtibial amputation (TTA) and unilateral transfemoral amputation (TFA) as well as ten able-bodied subjects participated. Participants were studied while using a MPF and their prescribed standard feet with fixed ankle attachments. The study investigated ascending and descending a 10° slope. Kinematic and kinetic data were recorded with a motion capture system. Biomechanical parameters, in particular leg joint angles, shank orientation and external joint moments of the prosthetics side were calculated.
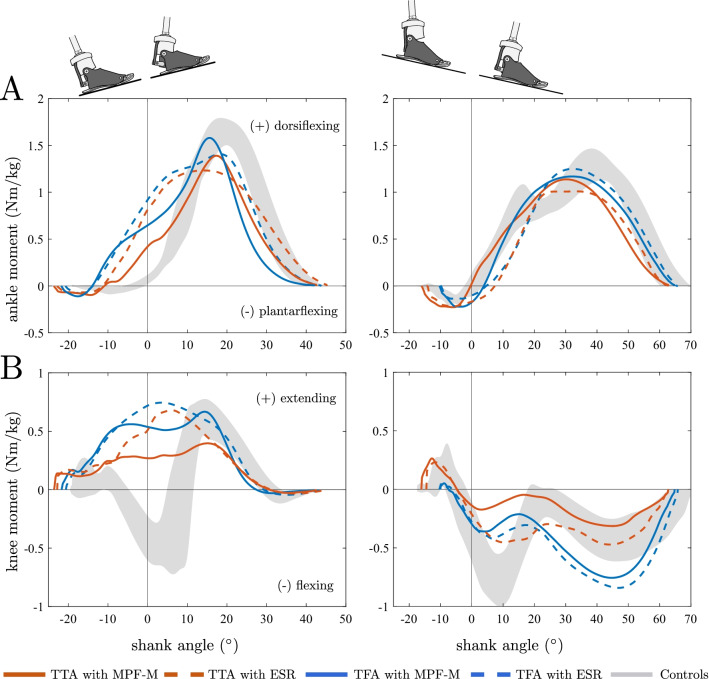
Results: Prosthetic feet- and subject group-dependent joint angle and moment characteristics were observed for both situations. The MPF showed a larger and situation-dependent ankle range of motion compared to the standard feet. Furthermore, it remained in a dorsiflexed position during swing. While ascending, the MPF adapted the dorsiflexion moment and reduced the knee extension moment. At vertical shank orientation, it reduced the knee extension moment by 26% for TFA and 49% for TTA compared to the standard feet. For descending, differences between feet in the biomechanical knee characteristics were found for the TTA group, but not for the TFA group. At the vertical shank angle during slope descent, TTA demonstrated a behavior of the ankle moment similar to able-bodied controls when using the MPF.
Conclusions: The studied MPF facilitated walking on slopes by adapting instantaneously to inclinations and, thus, easing the forward rotation of the leg over the prosthetic foot compared to standard feet with a fixed ankle attachment with amputation-level dependent effect sizes. It assumed a dorsiflexed ankle angle during swing, enabled a larger ankle range of motion and reduced the moments acting on the residual knee of TTA compared to the prescribed prosthetic standard feet. For individuals with TFA, the prosthetic knee joint seems to play a more crucial role for walking on ramps than the foot.
Keywords: Biomechanics; Microprocessor-controlled prosthetic feet; Prosthetic knee; Prosthetics; Ramp walking.
© 2022. The Author(s).
Conflict of interest statement
All authors are full-time employees of Ottobock, a manufacturer of prosthetic components. The authors alone were responsible for designing and conducting the study, data collection and analysis, interpretation of the data, and writing the manuscript. Ottobock allowed the authors to work on this study during their regular work schedules but had no influence on the study design and conduct, data analysis, decision to publish the results, or the write-up of the manuscript.
Figures

References
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Miscellaneous
