

Magnetic Soft Materials and Robots
- PMID: 35104403
- PMCID: PMC9211764
- DOI: 10.1021/acs.chemrev.1c00481
Magnetic Soft Materials and Robots
Abstract
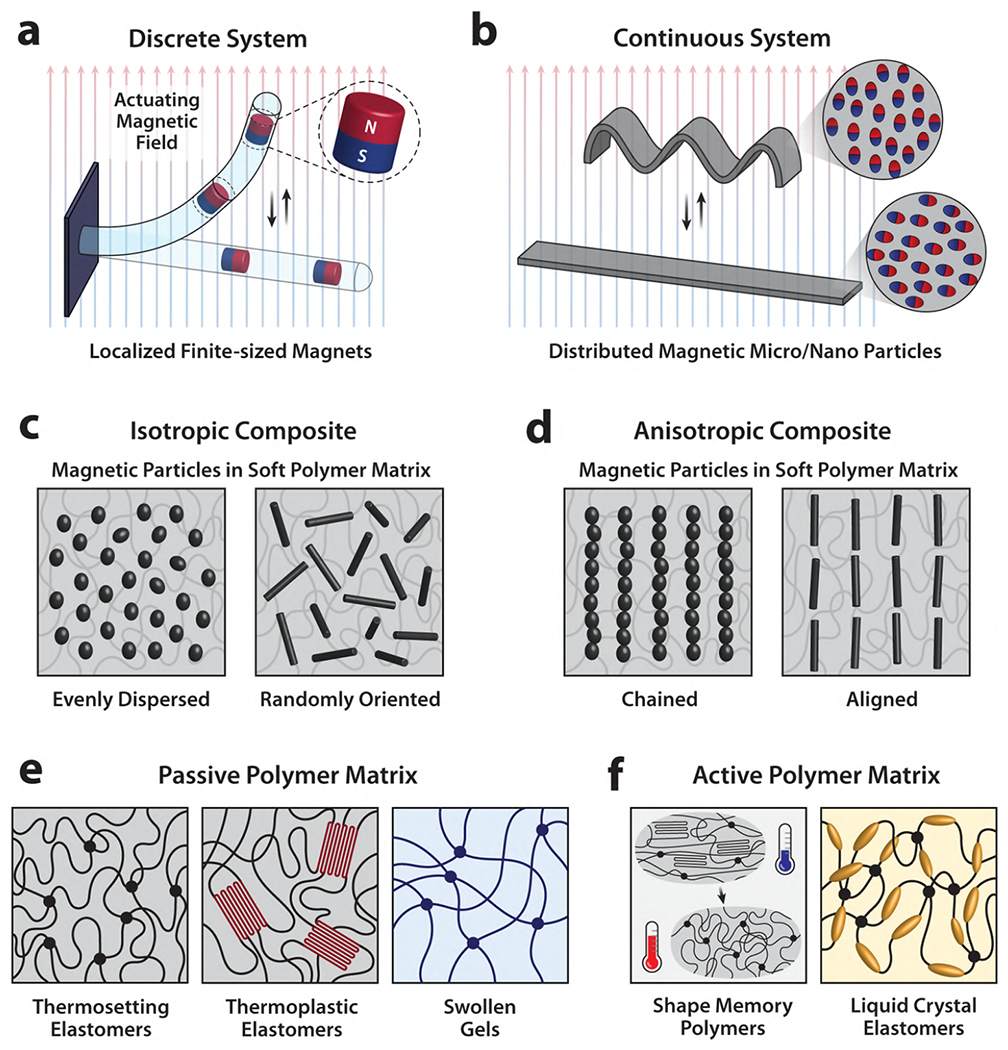
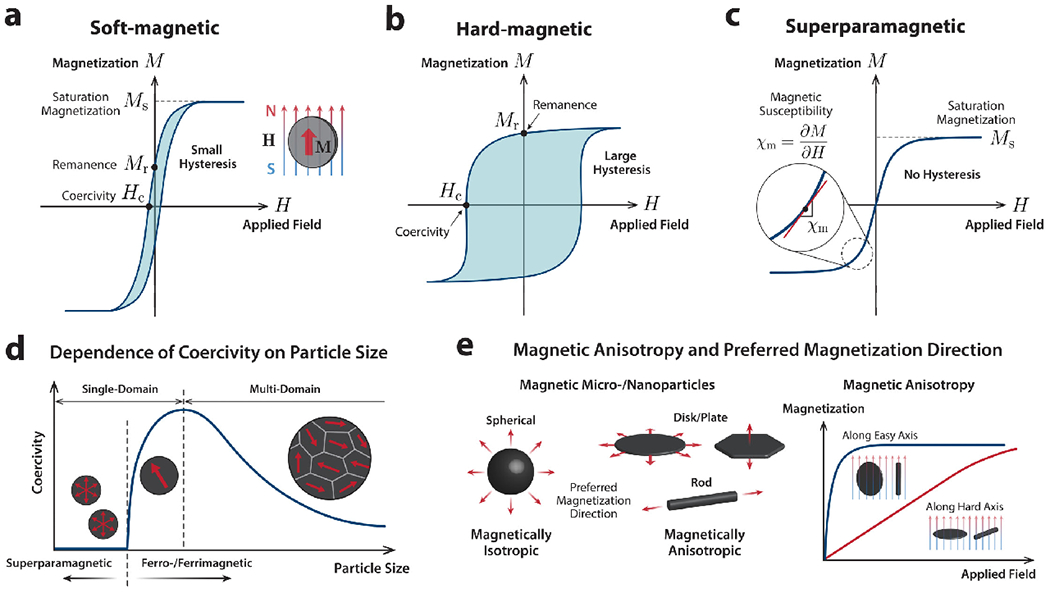
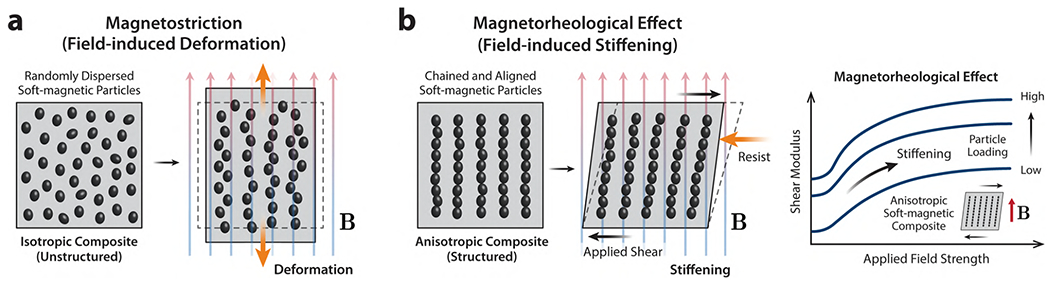
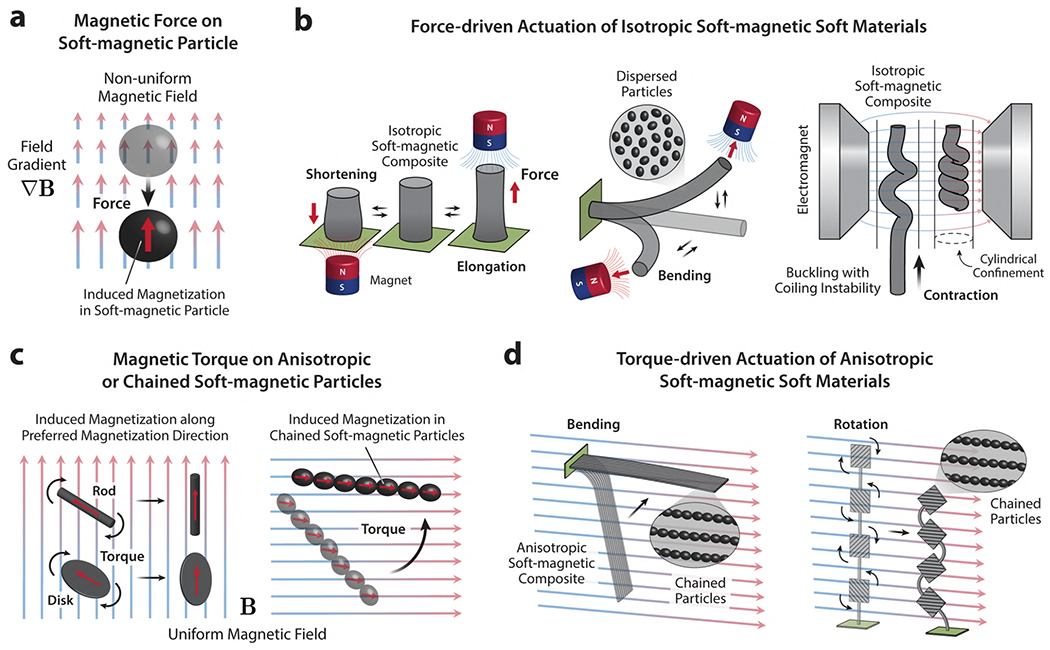
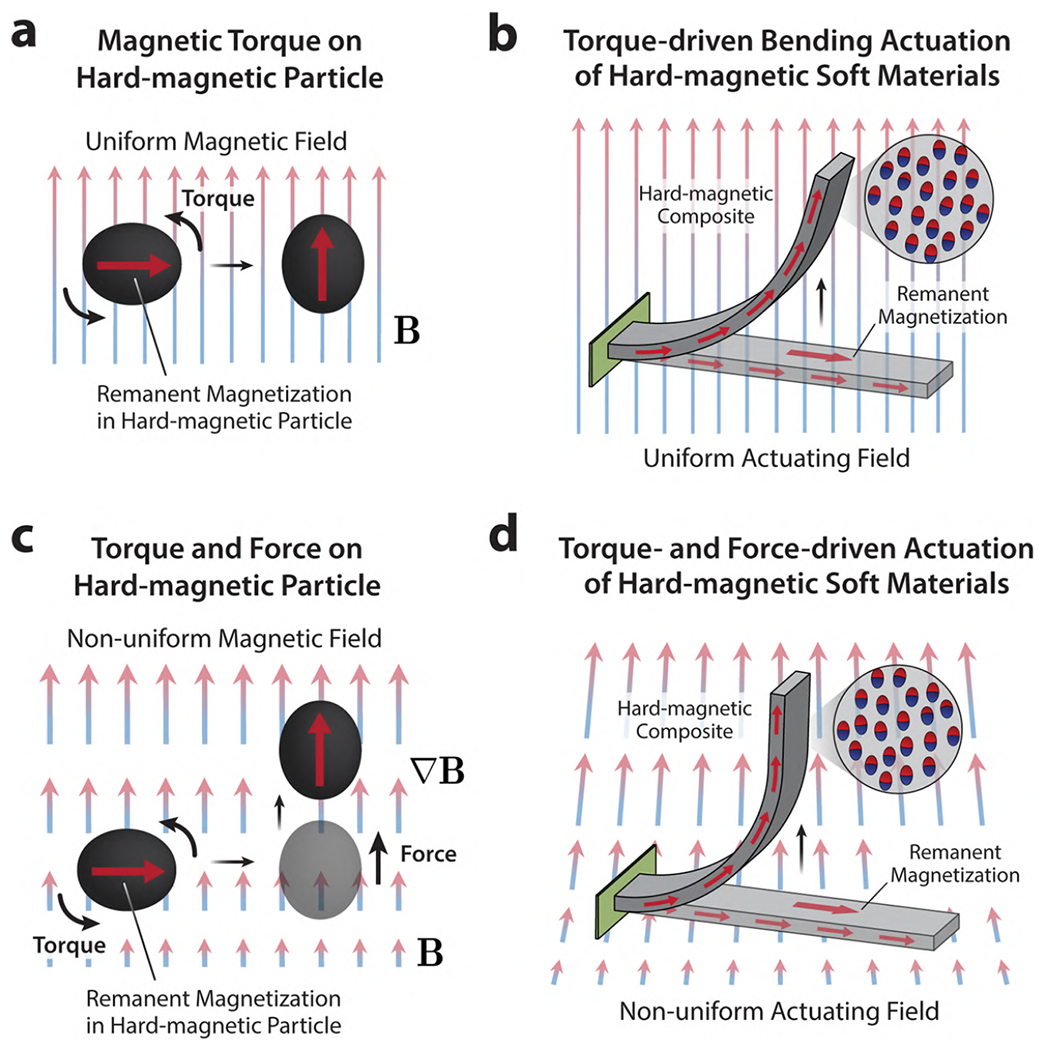
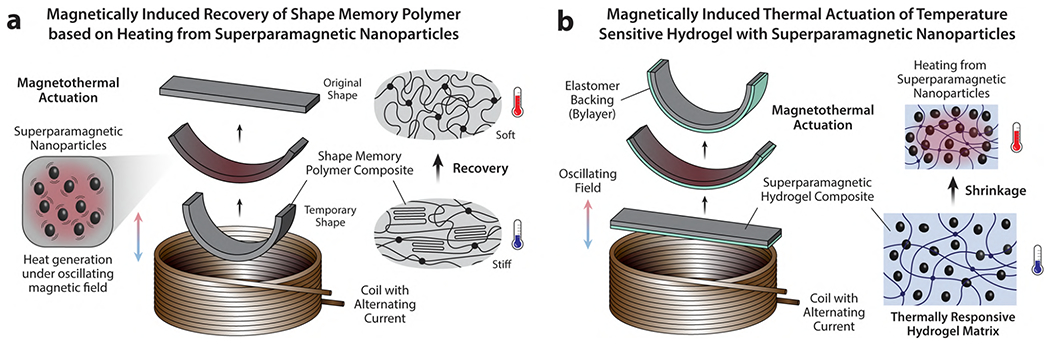
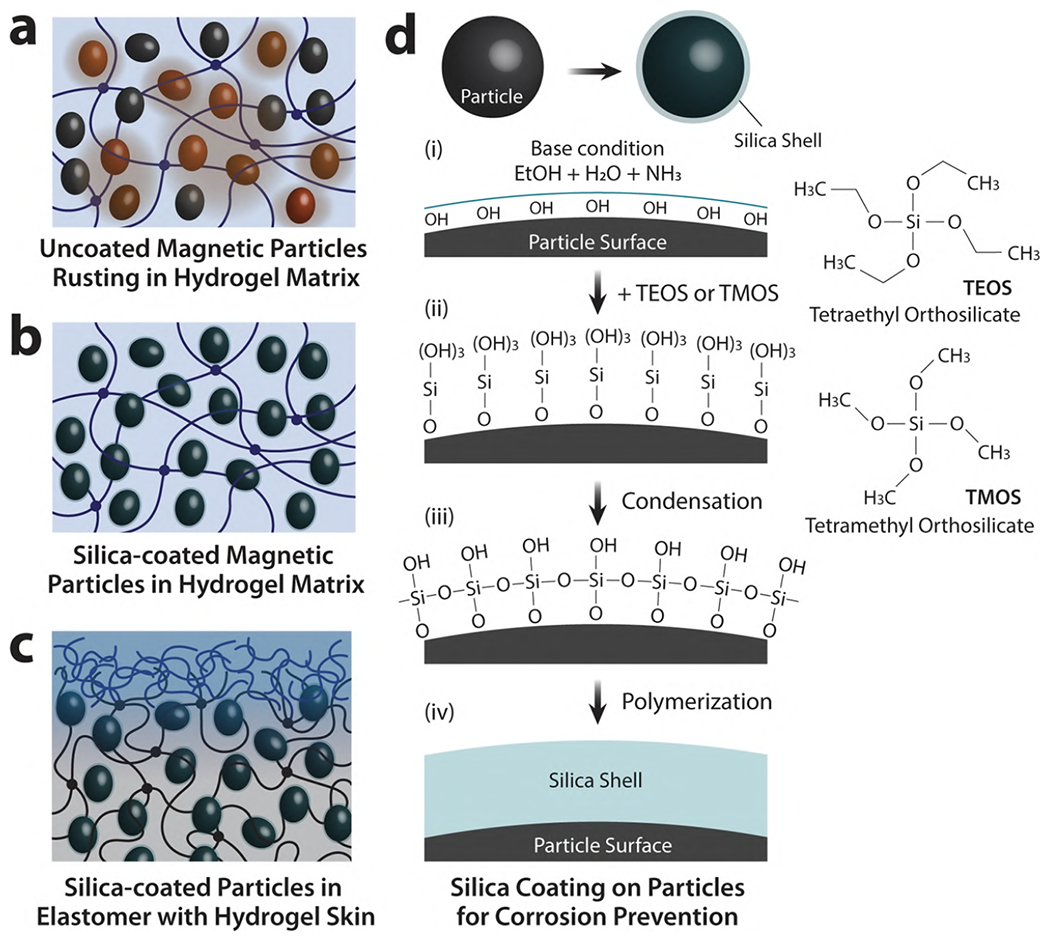
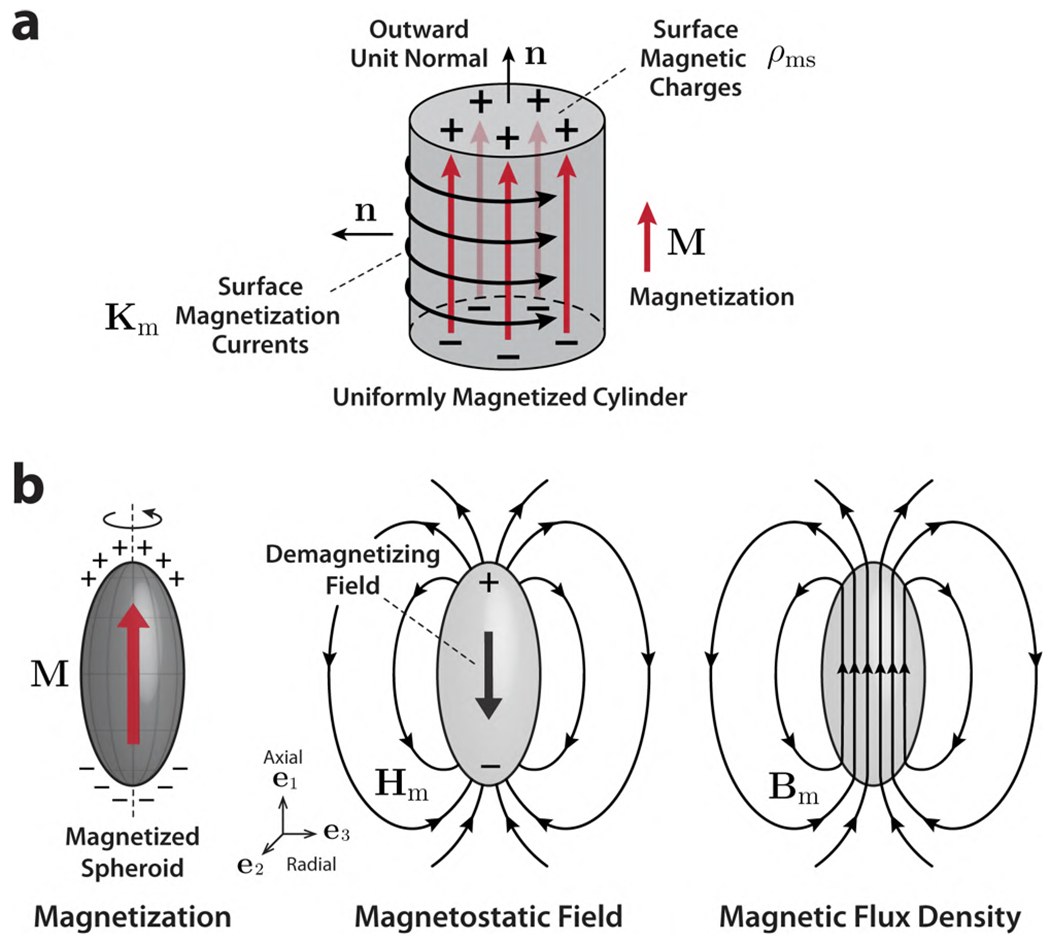
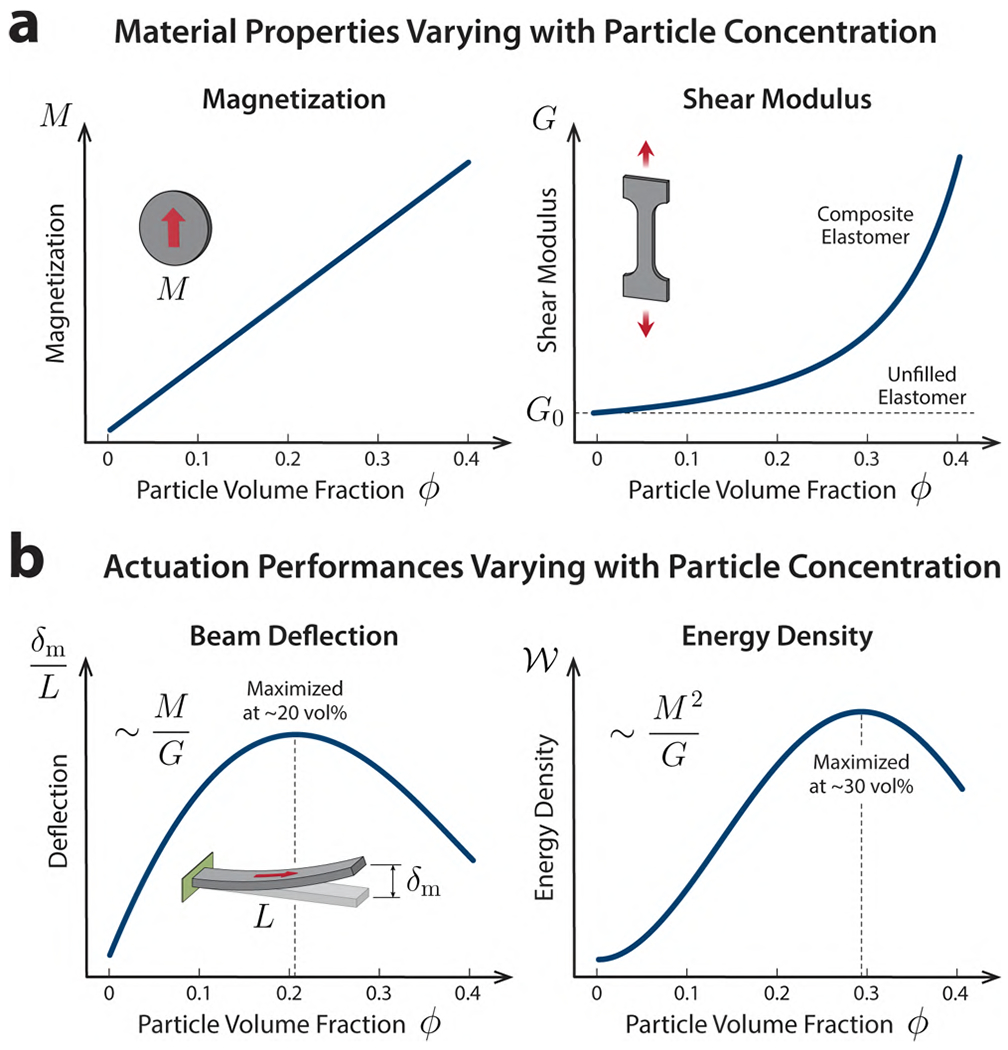
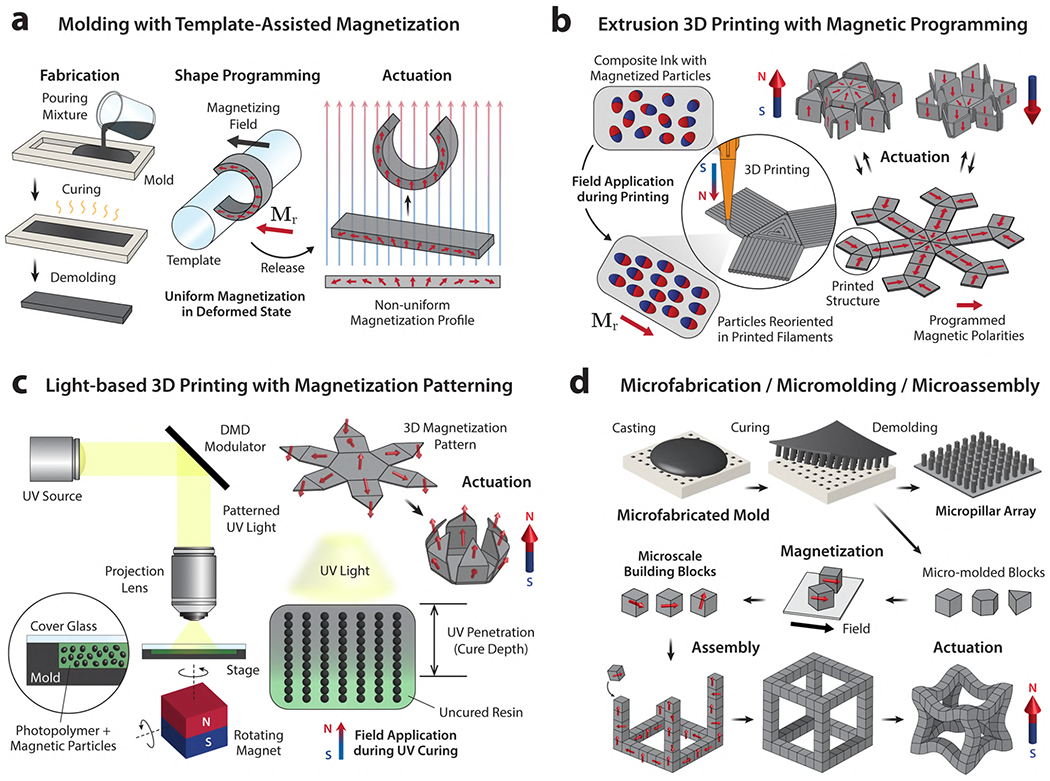
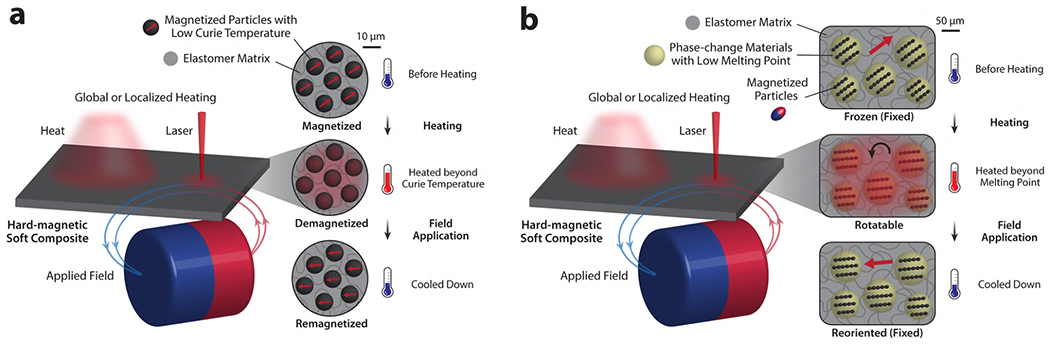
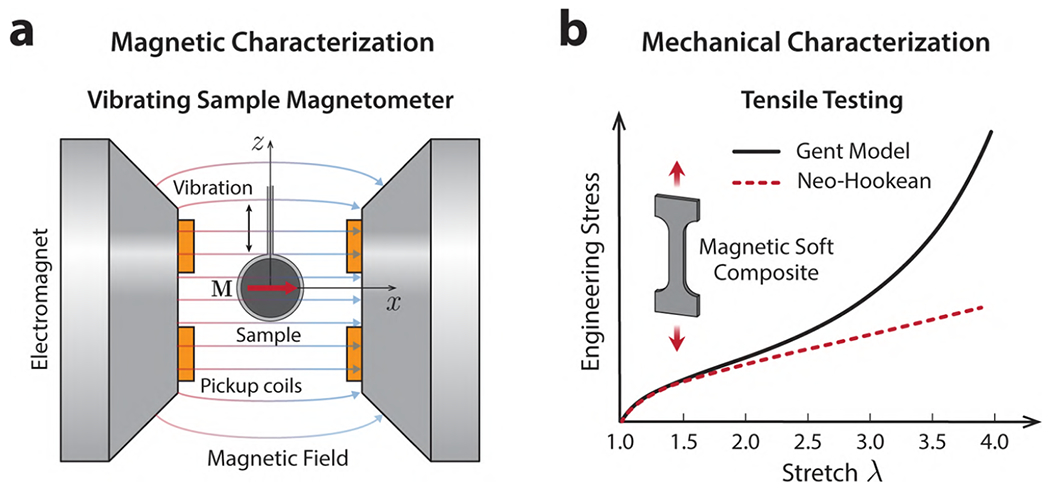
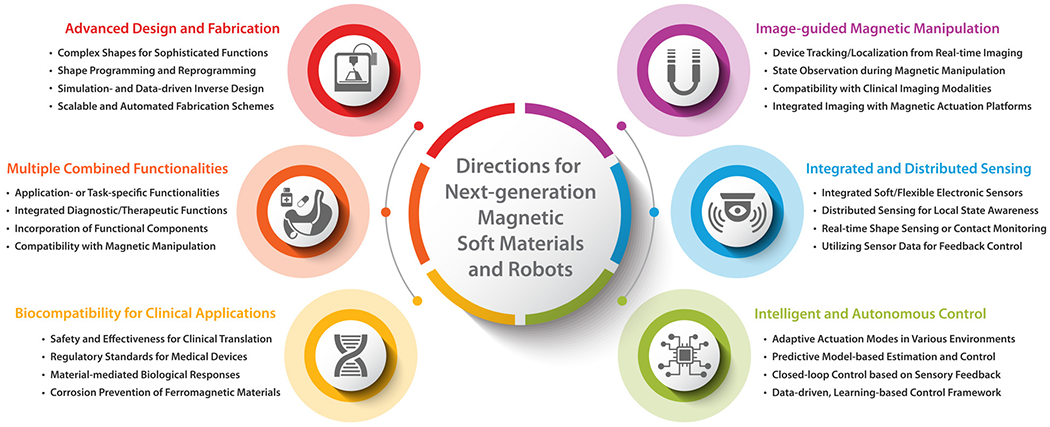
In conventional classification, soft robots feature mechanical compliance as the main distinguishing factor from traditional robots made of rigid materials. Recent advances in functional soft materials have facilitated the emergence of a new class of soft robots capable of tether-free actuation in response to external stimuli such as heat, light, solvent, or electric or magnetic field. Among the various types of stimuli-responsive materials, magnetic soft materials have shown remarkable progress in their design and fabrication, leading to the development of magnetic soft robots with unique advantages and potential for many important applications. However, the field of magnetic soft robots is still in its infancy and requires further advancements in terms of design principles, fabrication methods, control mechanisms, and sensing modalities. Successful future development of magnetic soft robots would require a comprehensive understanding of the fundamental principle of magnetic actuation, as well as the physical properties and behavior of magnetic soft materials. In this review, we discuss recent progress in the design and fabrication, modeling and simulation, and actuation and control of magnetic soft materials and robots. We then give a set of design guidelines for optimal actuation performance of magnetic soft materials. Lastly, we summarize potential biomedical applications of magnetic soft robots and provide our perspectives on next-generation magnetic soft robots.
Conflict of interest statement
The authors declare the following competing financial interest(s): Yoonho Kim and Xuanhe Zhao are inventors on patents and patent applications from Massachusetts Institute of Technology that describe fundamental principles and fabrication techniques for 3D-printed magnetic soft actuators and magnetically steerable soft continuum robots.
Figures

References
-
- Rus D; Tolley MT Design, Fabrication and Control of Soft Robots. Nature 2015, 521, 467–475. - PubMed
-
- Sitti M Miniature Soft Robots — Road to the Clinic. Nat. Rev. Mater 2018, 3, 74–75.
-
- Cianchetti M; Laschi C; Menciassi A; Dario P Biomedical Applications of Soft Robotics. Nat. Rev. Mater 2018, 3, 143–153.
-
- Ilievski F; Mazzeo AD; Shepherd RF; Chen X; Whitesides GM Soft Robotics for Chemists. Angew. Chem. Int. Ed 2011, 50, 1890–1895. - PubMed
-
- Laschi C; Mazzolai B; Cianchetti M Soft Robotics: Technologies and Systems Pushing the Boundaries of Robot Abilities. Sci. Robot 2016, 1, eaah3690. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
