

Recognition of natural objects in the archerfish
- PMID: 35142811
- PMCID: PMC8918800
- DOI: 10.1242/jeb.243237
Recognition of natural objects in the archerfish
Abstract
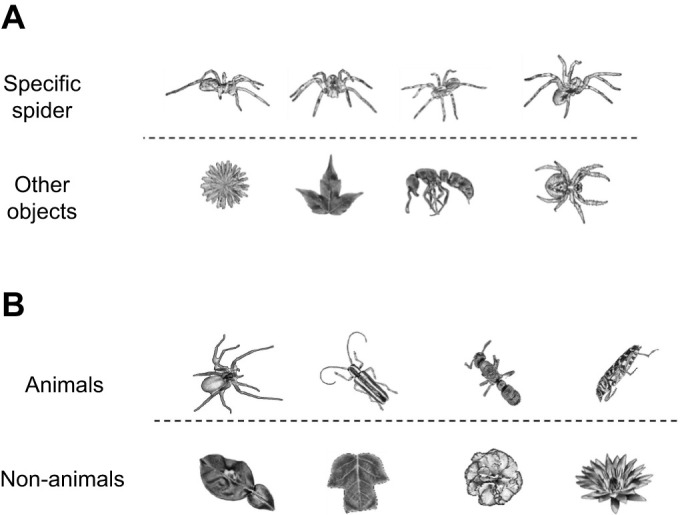
Recognition of individual objects and their categorization is a complex computational task. Nevertheless, visual systems can perform this task in a rapid and accurate manner. Humans and other animals can efficiently recognize objects despite countless variations in their projection on the retina due to different viewing angles, distance, illumination conditions and other parameters. To gain a better understanding of the recognition process in teleosts, we explored it in archerfish, a species that hunts by shooting a jet of water at aerial targets and thus can benefit from ecologically relevant recognition of natural objects. We found that archerfish not only can categorize objects into relevant classes but also can do so for novel objects, and additionally they can recognize an individual object presented under different conditions. To understand the mechanisms underlying this capability, we developed a computational model based on object features and a machine learning classifier. The analysis of the model revealed that a small number of features was sufficient for categorization, and the fish were more sensitive to object contours than textures. We tested these predictions in additional behavioral experiments and validated them. Our findings suggest the existence of a complex visual process in the archerfish visual system that enables object recognition and categorization.
Keywords: Computational model; Object categorization; Visual object recognition; Visual system.
© 2022. Published by The Company of Biologists Ltd.
Conflict of interest statement
Competing interests The authors declare no competing or financial interests.
Figures






Similar articles
-
Object identity representation occurs early in the archerfish visual system.Sci Rep. 2025 Feb 3;15(1):4102. doi: 10.1038/s41598-025-88660-7. Sci Rep. 2025. PMID: 39900793 Free PMC article.
-
Figure-ground segmentation based on motion in the archerfish.Anim Cogn. 2024 Apr 15;27(1):33. doi: 10.1007/s10071-024-01873-7. Anim Cogn. 2024. PMID: 38616235 Free PMC article.
-
Visual search in hunting archerfish shares all hallmarks of human performance.J Exp Biol. 2013 Aug 15;216(Pt 16):3096-103. doi: 10.1242/jeb.087734. Epub 2013 Apr 25. J Exp Biol. 2013. PMID: 23619420
-
Archerfish vision: Visual challenges faced by a predator with a unique hunting technique.Semin Cell Dev Biol. 2020 Oct;106:53-60. doi: 10.1016/j.semcdb.2020.05.017. Epub 2020 Jun 7. Semin Cell Dev Biol. 2020. PMID: 32522409 Review.
-
Object recognition and segmentation by a fragment-based hierarchy.Trends Cogn Sci. 2007 Feb;11(2):58-64. doi: 10.1016/j.tics.2006.11.009. Epub 2006 Dec 22. Trends Cogn Sci. 2007. PMID: 17188555 Review.
Cited by
-
Object identity representation occurs early in the archerfish visual system.Sci Rep. 2025 Feb 3;15(1):4102. doi: 10.1038/s41598-025-88660-7. Sci Rep. 2025. PMID: 39900793 Free PMC article.
-
An evolutionarily distinct Hmgn2 variant influences shape recognition in Medaka Fish.Commun Biol. 2024 Aug 23;7(1):973. doi: 10.1038/s42003-024-06667-8. Commun Biol. 2024. PMID: 39179658 Free PMC article.
-
The archerfish uses motor adaptation in shooting to correct for changing physical conditions.Elife. 2024 Jun 3;12:RP92909. doi: 10.7554/eLife.92909. Elife. 2024. PMID: 38829209 Free PMC article.
-
Figure-ground segmentation based on motion in the archerfish.Anim Cogn. 2024 Apr 15;27(1):33. doi: 10.1007/s10071-024-01873-7. Anim Cogn. 2024. PMID: 38616235 Free PMC article.
References
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
