

Dual-Resonance (16/32 MHz) Piezoelectric Transducer With a Single Electrical Connection for Forward-Viewing Robotic Guidewire
- PMID: 35143395
- PMCID: PMC9013008
- DOI: 10.1109/TUFFC.2022.3150746
Dual-Resonance (16/32 MHz) Piezoelectric Transducer With a Single Electrical Connection for Forward-Viewing Robotic Guidewire
Abstract
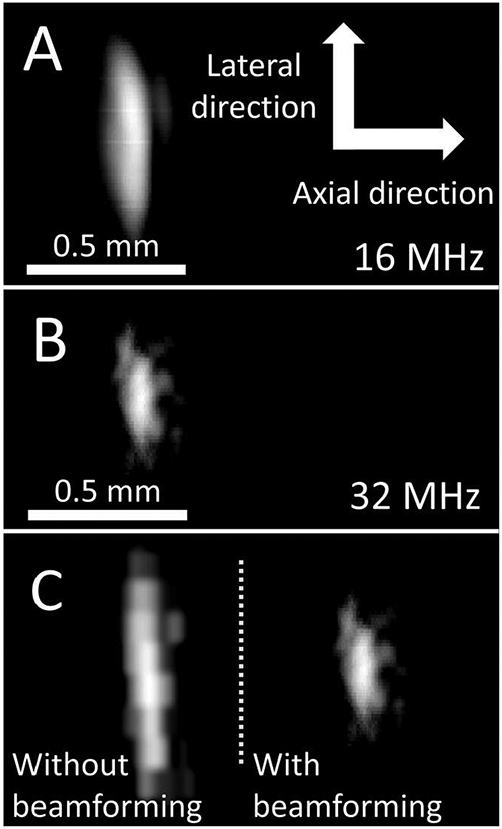
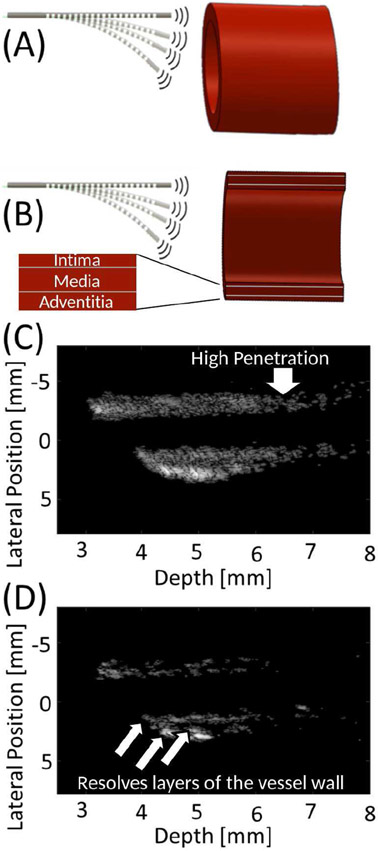
Peripheral artery disease (PAD) affects more than 200 million people globally. Minimally invasive endovascular procedures can provide relief and salvage limbs while reducing injury rates and recovery times. Unfortunately, when a calcified chronic total occlusion is encountered, ~25% of endovascular procedures fail due to the inability to advance a guidewire using the view provided by fluoroscopy. To enable a sub-millimeter, robotically steerable guidewire to cross these occlusions, a novel single-element, dual-band transducer is developed that provides simultaneous multifrequency, forward-viewing imaging with high penetration depth and high spatial resolution while requiring only a single electrical connection. The design, fabrication, and acoustic characterization of this device are described, and proof-of-concept imaging is demonstrated in an ex vivo porcine artery after integration with a robotically steered guidewire. Measured center frequencies of the developed transducer were 16 and 32 MHz, with -6 dB fractional bandwidths of 73% and 23%, respectively. When imaging a 0.2-mm wire target at a depth of 5 mm, measured -6 dB target widths were 0.498 ± 0.02 and 0.268 ± 0.01 mm for images formed at 16 and 32 MHz, respectively. Measured SNR values were 33.3 and 21.3 dB, respectively. The 3-D images of the ex vivo artery demonstrate high penetration for visualizing vessel morphology at 16 MHz and ability to resolve small features close to the transducer at 32 MHz. Using images acquired simultaneously at both frequencies as part of an integrated forward-viewing, guidewire-based imaging system, an interventionalist could visualize the best path for advancing the guidewire to improve outcomes for patients with PAD.
Figures









References
-
- Rogers JH and Laird JR, “Overview of new technologies for lower extremity revascularization,” Circulation, vol. 116, no. 18, pp. 2072–2085, 2007. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
