

Carved Turn Control with Gate Vision Recognition of a Humanoid Robot for Giant Slalom Skiing on Ski Slopes
- PMID: 35161561
- PMCID: PMC8838643
- DOI: 10.3390/s22030816
Carved Turn Control with Gate Vision Recognition of a Humanoid Robot for Giant Slalom Skiing on Ski Slopes
Abstract
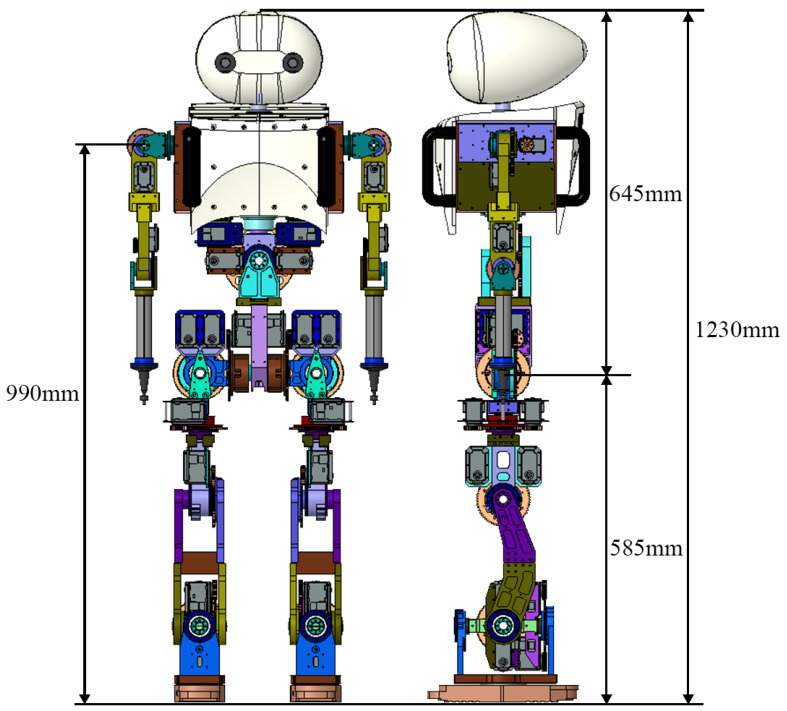
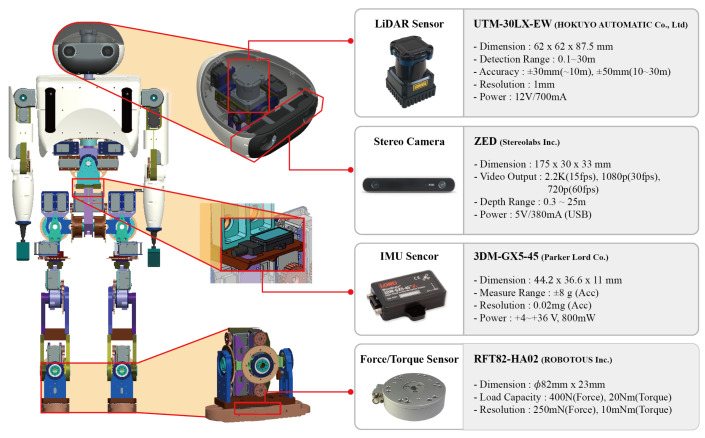
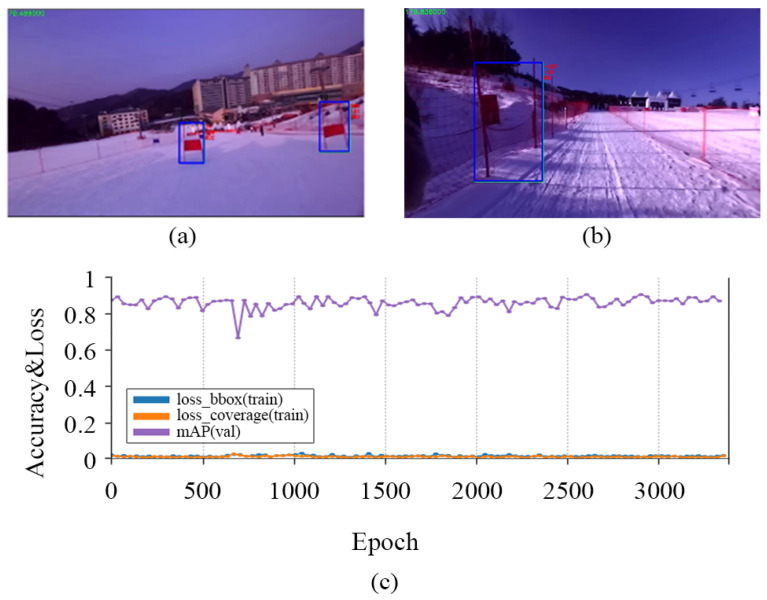
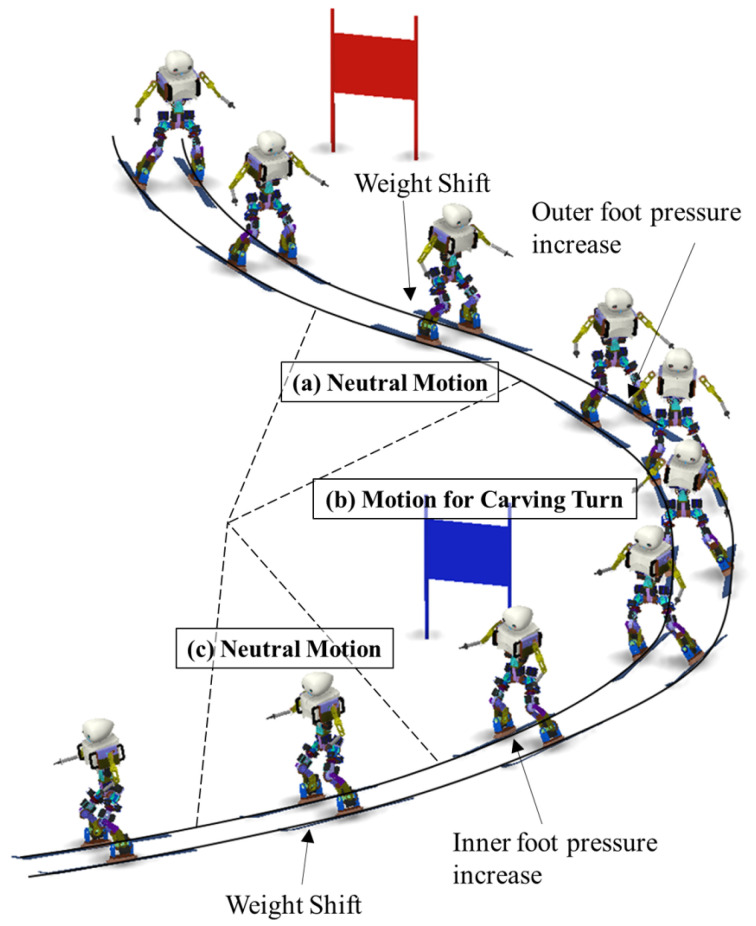
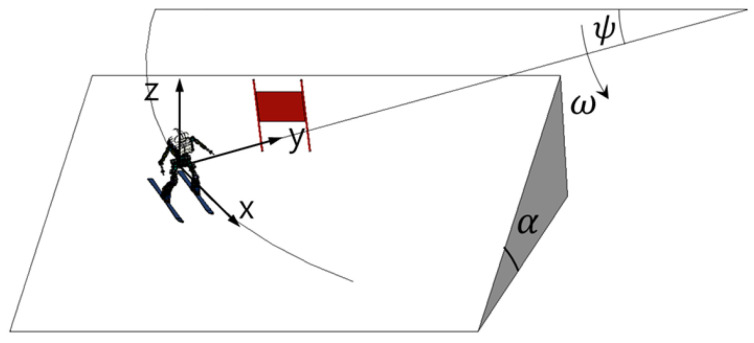
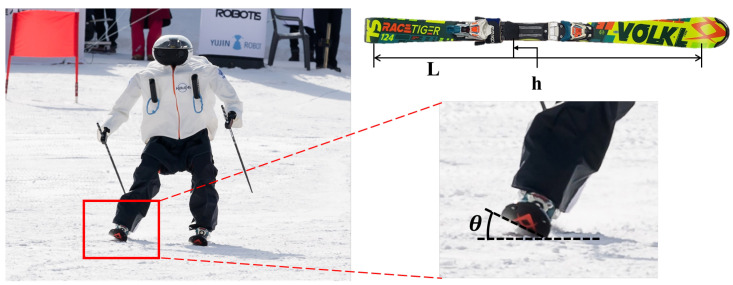
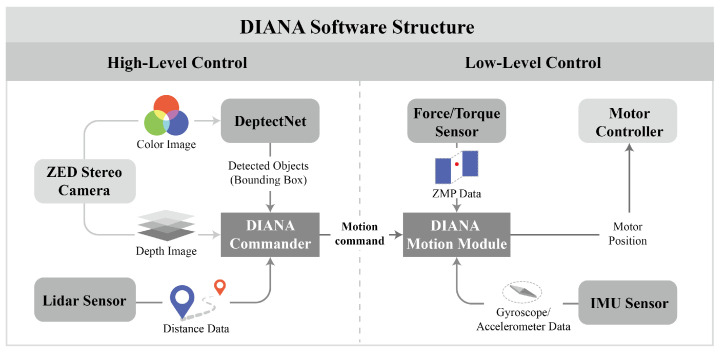
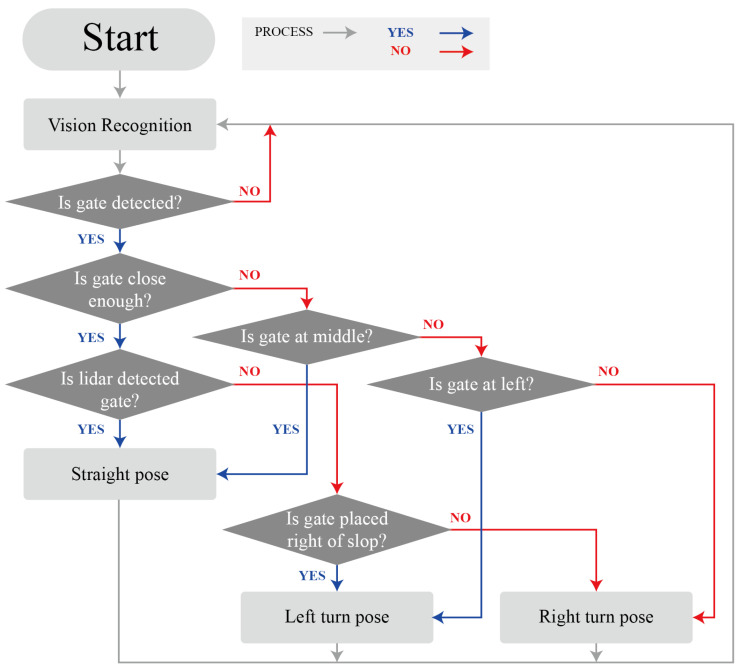
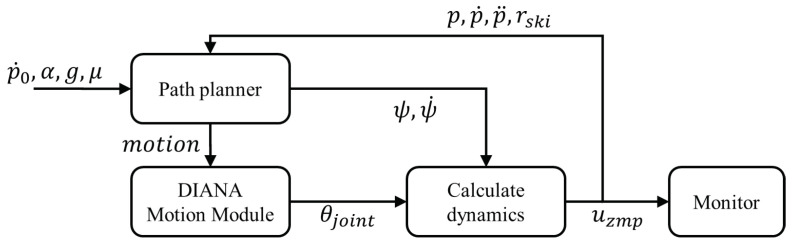
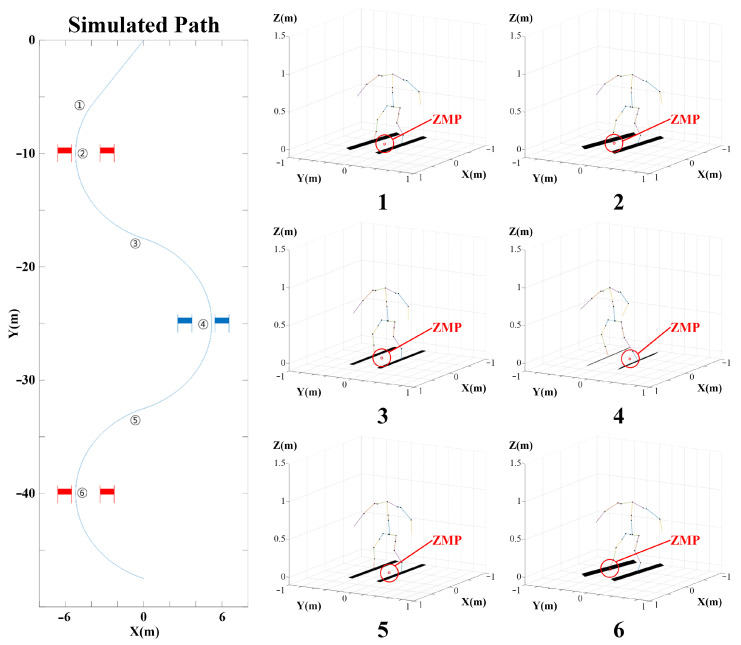
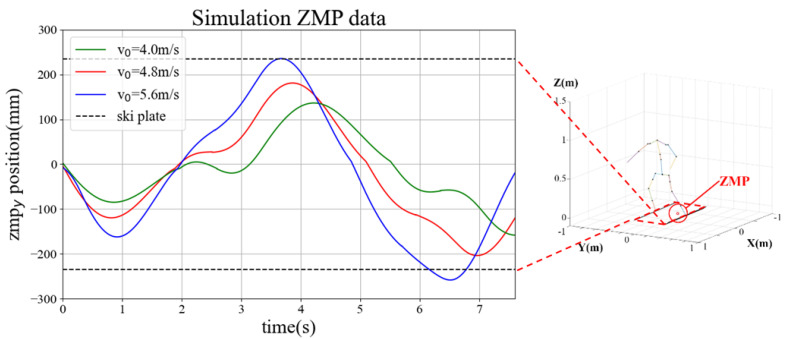
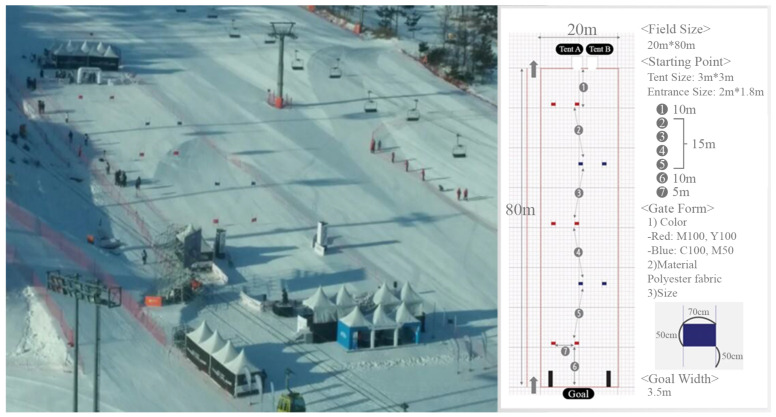
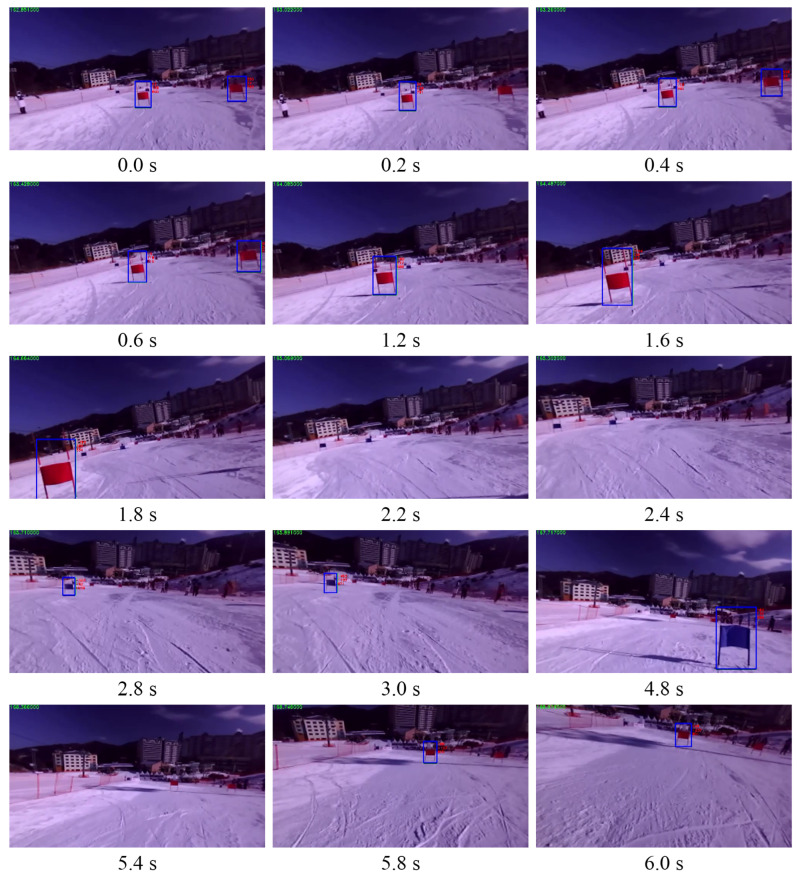
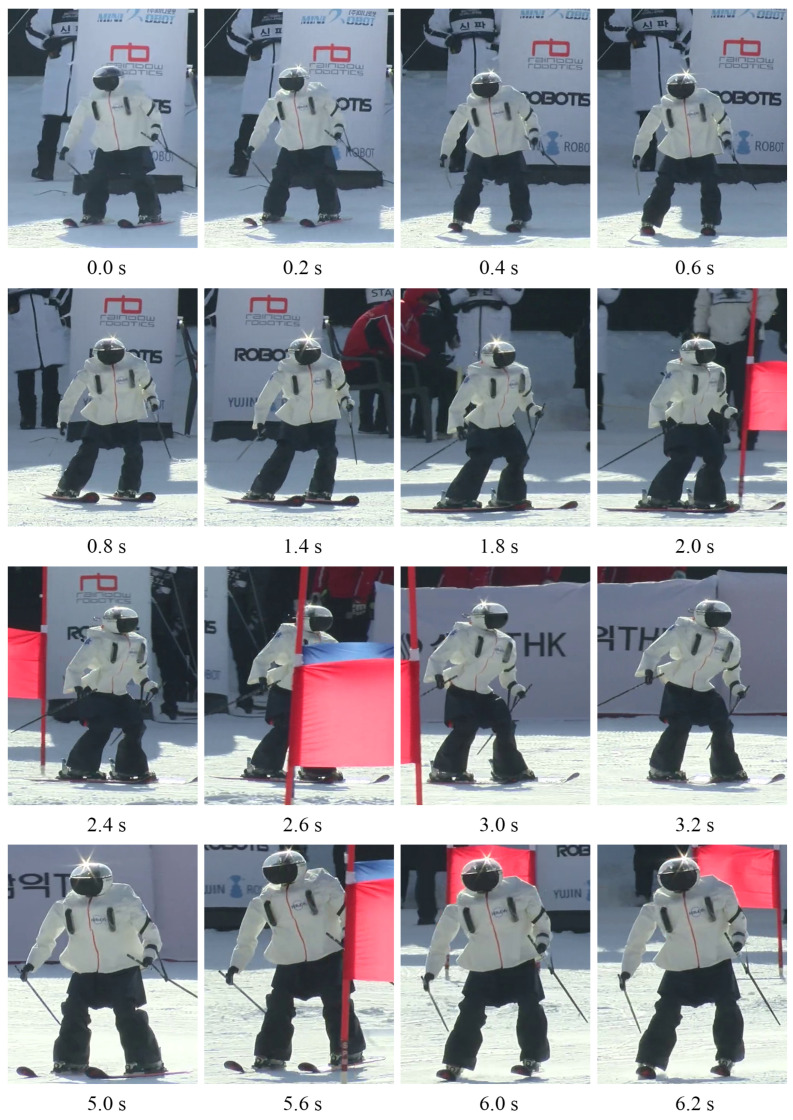
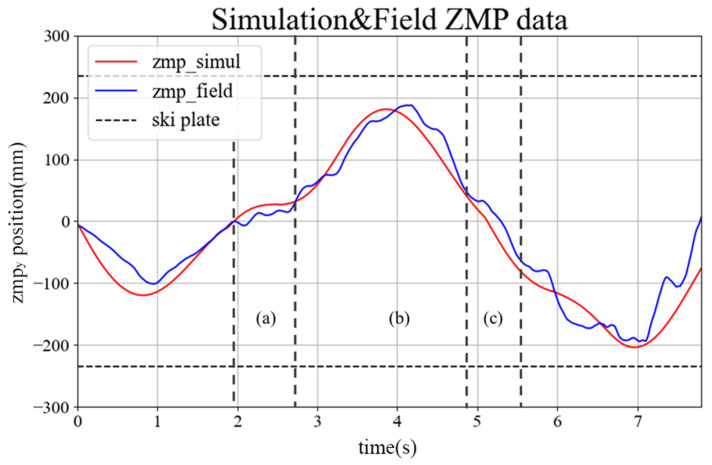
The performance of humanoid robots is improving, owing in part to their participation in robot games such as the DARPA Robotics Challenge. Along with the 2018 Winter Olympics in Pyeongchang, a Skiing Robot Competition was held in which humanoid robots participated autonomously in a giant slalom alpine skiing competition. The robots were required to transit through many red or blue gates on the ski slope to reach the finish line. The course was relatively short at 100 m long and had an intermediate-level rating. A 1.23 m tall humanoid ski robot, 'DIANA', was developed for this skiing competition. As a humanoid robot that mimics humans, the goal was to descend the slope as fast as possible, so the robot was developed to perform a carved turn motion. The carved turn was difficult to balance compared to other turn methods. Therefore, ZMP control, which could secure the posture stability of the biped robot, was applied. Since skiing takes place outdoors, it was necessary to ensure recognition of the flags in various weather conditions. This was ensured using deep learning-based vision recognition. Thus, the performance of the humanoid robot DIANA was established using the carved turn in an experiment on an actual ski slope. The ultimate vision for humanoid robots is for them to naturally blend into human society and provide necessary services to people. Previously, there was no way for a full-sized humanoid robot to move on a snowy mountain. In this study, a humanoid robot that transcends this limitation was realized.
Keywords: ZMP control; carved turn; humanoid; ski robot; vision recognition.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures


References
-
- Kajita S., Hirukawa H., Harada K., Yokoi K. Introduction to Humanoid Robotics. Volume 101 Springer; Berlin/Heidelberg, Germany: 2014.
-
- Krotkov E., Hackett D., Jackel L., Perschbacher M., Pippine J., Strauss J., Pratt G., Orlowski C. The DARPA Robotics Challenge Finals: Results and Perspectives. J. Field Robot. 2017;34:229–240. doi: 10.1002/rob.21683. - DOI
-
- Lindemann R., Voorhees C. Mars Exploration Rover mobility assembly design, test and performance; Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics; Waikoloa, HI, USA. 12 October 2005; pp. 450–455. - DOI
-
- Aoki T., Murayama Y., Hirose S. Development of a Transformable Three-wheeled Lunar Rover: Tri-Star IV. J. Field Robot. 2014;31:206–223. doi: 10.1002/rob.21482. - DOI
-
- Underwood J., Wendel A., Schofield B., McMurray L., Kimber R. Efficient in-field plant phenomics for row-crops with an autonomous ground vehicle. J. Field Robot. 2017;34:1061–1083. doi: 10.1002/rob.21728. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
