

A deep learning-based toolbox for Automated Limb Motion Analysis (ALMA) in murine models of neurological disorders
- PMID: 35169263
- PMCID: PMC8847458
- DOI: 10.1038/s42003-022-03077-6
A deep learning-based toolbox for Automated Limb Motion Analysis (ALMA) in murine models of neurological disorders
Abstract
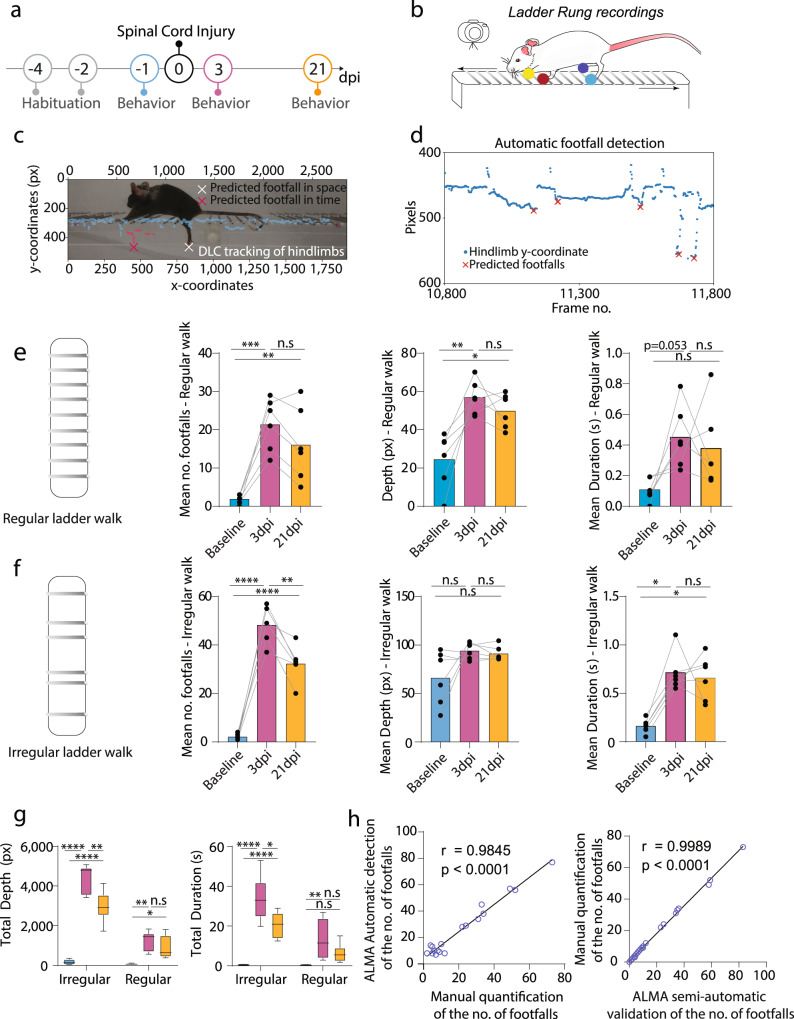
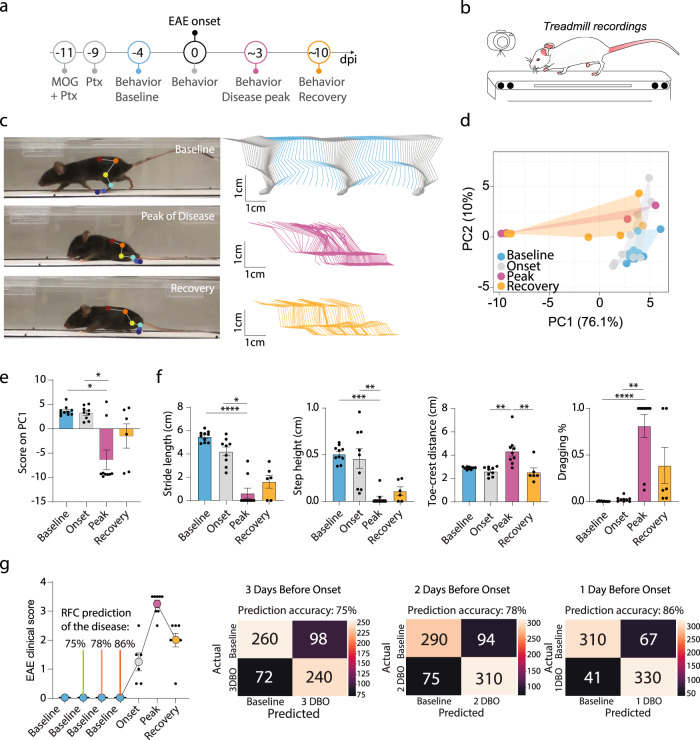
In neuroscience research, the refined analysis of rodent locomotion is complex and cumbersome, and access to the technique is limited because of the necessity for expensive equipment. In this study, we implemented a new deep learning-based open-source toolbox for Automated Limb Motion Analysis (ALMA) that requires only basic behavioral equipment and an inexpensive camera. The ALMA toolbox enables the consistent and comprehensive analyses of locomotor kinematics and paw placement and can be applied to neurological conditions affecting the brain and spinal cord. We demonstrated that the ALMA toolbox can (1) robustly track the evolution of locomotor deficits after spinal cord injury, (2) sensitively detect locomotor abnormalities after traumatic brain injury, and (3) correctly predict disease onset in a multiple sclerosis model. We, therefore, established a broadly applicable automated and standardized approach that requires minimal financial and time commitments to facilitate the comprehensive analysis of locomotion in rodent disease models.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- Krakauer, J. W., Ghazanfar, A. A., Gomez-Marin, A., Maciver, M. A. & Poeppel, D. Perspective neuroscience needs behavior: correcting a reductionist bias. 10.1016/j.neuron.2016.12.041 (2017). - PubMed
-
- Boyden ES, Zhang F, Bamberg E, Nagel G, Deisseroth K. Millisecond-timescale, genetically targeted optical control of neural activity. Nat. Neurosci. 2005;8:1263–1268. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
