

Wearable Power-Assist Locomotor for Gait Reconstruction in Patients With Spinal Cord Injury: A Retrospective Study
- PMID: 35250528
- PMCID: PMC8894852
- DOI: 10.3389/fnbot.2022.775724
Wearable Power-Assist Locomotor for Gait Reconstruction in Patients With Spinal Cord Injury: A Retrospective Study
Abstract
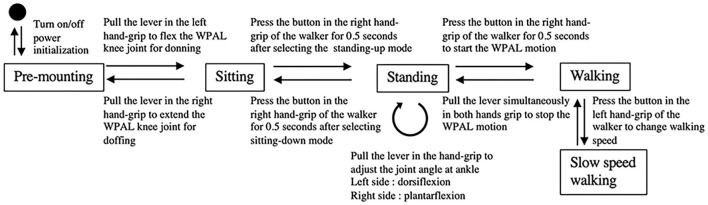
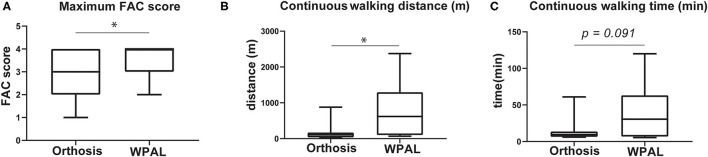
Wearable robotic exoskeletons (WREs) have been developed from orthoses as assistive devices for gait reconstruction in patients with spinal cord injury. They can solve some problems encountered with orthoses, such as difficulty in independent walking and standing up and high energy consumption during walking. The Wearable Power-Assist Locomotor (WPAL), a WRE, was developed based on a knee-ankle-foot orthosis with a single medial hip joint. The WPAL has been updated seven times during the period from the beginning of its development, in 2005, to 2020. The latest version, launched as a commercialized model in 2016, is available for medical facilities. In this retrospective study, which included updated results from previous reports, all data were extracted from development research records from July 2007 to December 2020. The records were as follows: patient characteristics [the number of participants, injury level, and the American Spinal Injury Association Impairment Scale (AIS) score], the total number of WPAL trials when aggregating the cases with all the versions or only the latest version of the WPAL, and maximum walking performance (functional ambulation category [FAC], distance, and time of continuous walking). Thirty-one patients participated in the development research. The levels of spinal cord injury were cervical (C5-C8), upper thoracic (T3-T6), lower thoracic (T7-T12), and lumbar (L1) in 10, 5, 15, and 1 of the patients, respectively. The numbers of patients with AIS scores of A, B, C, and D were 20, 7, 4, and 0, respectively. The total number of WPAL trials was 1,785, of which 1,009 were used the latest version of the WPAL. Twenty of the patients achieved an FAC score of 4 after an average of 9 (median 8, range 2-22) WPAL trials. The continuous walking distance and time improved with the WPAL were compared to the orthosis. We confirmed that the WPAL improves walking independence in people with a wide range of spinal cord injuries, such as cervical spinal cord injuries. Further refinement of the WPAL will enable its long-term use at home.
Keywords: clinical experience; gait; paraplegia; tetraplegia; wearable robotic exoskeleton.
Copyright © 2022 Koyama, Tanabe, Gotoh, Taguchi, Katoh, Saitoh, Otaka and Hirano.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

Similar articles
-
Comparison of energy efficiency between Wearable Power-Assist Locomotor (WPAL) and two types of knee-ankle-foot orthoses with a medial single hip joint (MSH-KAFO).J Spinal Cord Med. 2018 Jan;41(1):48-54. doi: 10.1080/10790268.2016.1226701. Epub 2016 Oct 17. J Spinal Cord Med. 2018. PMID: 27748162 Free PMC article.
-
Wearable Power-Assist Locomotor (WPAL) for supporting upright walking in persons with paraplegia.NeuroRehabilitation. 2013;33(1):99-106. doi: 10.3233/NRE-130932. NeuroRehabilitation. 2013. PMID: 23949036
-
Clinical feasibility of gait training with a robotic exoskeleton (WPAL) in an individual with both incomplete cervical and complete thoracic spinal cord injury: A case study.NeuroRehabilitation. 2017;41(1):85-95. doi: 10.3233/NRE-171460. NeuroRehabilitation. 2017. PMID: 28527225
-
Wearable robotic exoskeleton for gait reconstruction in patients with spinal cord injury: A literature review.J Orthop Translat. 2021 Mar 1;28:55-64. doi: 10.1016/j.jot.2021.01.001. eCollection 2021 May. J Orthop Translat. 2021. PMID: 33717982 Free PMC article. Review.
-
The efficacy of powered orthoses on walking in persons with paraplegia.Prosthet Orthot Int. 2015 Apr;39(2):90-9. doi: 10.1177/0309364613520031. Epub 2014 Feb 18. Prosthet Orthot Int. 2015. PMID: 24549210 Review.
Cited by
-
Changes in Distance between a Wearable Robotic Exoskeleton User and Four-Wheeled Walker during Gait in Level and Slope Conditions: Implications for Fall Prevention Systems.Biomimetics (Basel). 2023 May 23;8(2):213. doi: 10.3390/biomimetics8020213. Biomimetics (Basel). 2023. PMID: 37366808 Free PMC article.
-
[Research status of lower limb exoskeleton rehabilitation robot].Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2024 Aug 25;41(4):833-839. doi: 10.7507/1001-5515.202211055. Sheng Wu Yi Xue Gong Cheng Xue Za Zhi. 2024. PMID: 39218611 Free PMC article. Review. Chinese.
References
-
- Birch N., Graham J., Priestley T., Heywood C., Sakel M., Gall A., et al. . (2017). Results of the first interim analysis of the RAPPER II trial in patients with spinal cord injury: ambulation and functional exercise programs in the REX powered walking aid. J. Neuroeng. Rehabil. 14, 60. 10.1186/s12984-017-0274-6 - DOI - PMC - PubMed
LinkOut - more resources
Full Text Sources
Miscellaneous