

Serious Games Strategies With Cable-Driven Robots for Bimanual Rehabilitation: A Randomized Controlled Trial With Post-Stroke Patients
- PMID: 35252362
- PMCID: PMC8892256
- DOI: 10.3389/frobt.2022.739088
Serious Games Strategies With Cable-Driven Robots for Bimanual Rehabilitation: A Randomized Controlled Trial With Post-Stroke Patients
Abstract
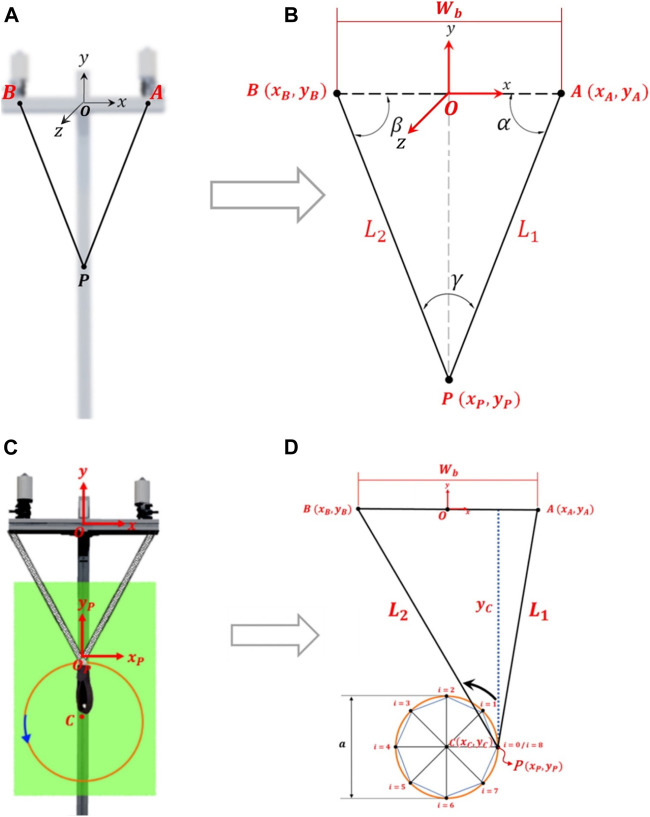
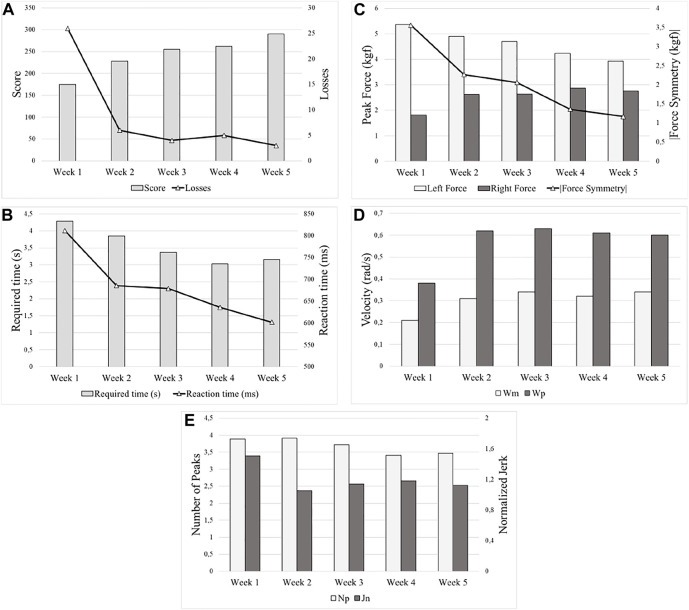
Cable-driven robots can be an ideal fit for performing post-stroke rehabilitation due to their specific features. For example, they have small and lightweight moving parts and a relatively large workspace. They also allow safe human-robot interactions and can be easily adapted to different patients and training protocols. However, the existing cable-driven robots are mostly unilateral devices that can allow only the rehabilitation of the most affected limb. This leaves unaddressed the rehabilitation of bimanual activities, which are predominant within the common Activities of Daily Living (ADL). Serious games can be integrated with cable-driven robots to further enhance their features by providing an interactive experience and by generating a high level of engagement in patients, while they can turn monotonous and repetitive therapy exercises into entertainment tasks. Additionally, serious game interfaces can collect detailed quantitative treatment information such as exercise time, velocities, and force, which can be very useful to monitor a patient's progress and adjust the treatment protocols. Given the above-mentioned strong advantages of both cable driven robots, bimanual rehabilitation and serious games, this paper proposes and discusses a combination of them, in particular, for performing bilateral/bimanual rehabilitation tasks. The main design characteristics are analyzed for implementing the design of both the hardware and software components. The hardware design consists of a specifically developed cable-driven robot. The software design consists of a specifically developed serious game for performing bimanual rehabilitation exercises. The developed software also includes BiEval. This specific software allows to quantitatively measure and assess the rehabilitation therapy effects. An experimental validation is reported with 15 healthy subjects and a RCT (Randomized Controlled Trial) has been performed with 10 post-stroke patients at the Physiotherapy's Clinic of the Federal University of Uberlândia (Minas Gerais, Brazil). The RCT results demonstrate the engineering feasibility and effectiveness of the proposed cable-driven robot in combination with the proposed BiEval software as a valuable tool to augment the conventional physiotherapy protocols and for providing reliable measurements of the patient's rehabilitation performance and progress. The clinical trial was approved by the Research Ethics Committee of the UFU (Brazil) under the CAAE N° 00914818.5.0000.5152 on plataformabrasil@saude.gov.br.
Keywords: bimanual; cable-driven robots; post-stroke; rehabilitation; robotics; serious games; software.
Copyright © 2022 Alves, Gonçalves and Carbone.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures












Similar articles
-
A review of technological and clinical aspects of robot-aided rehabilitation of upper-extremity after stroke.Disabil Rehabil Assist Technol. 2016;11(4):263-80. doi: 10.3109/17483107.2014.1002539. Epub 2015 Jan 20. Disabil Rehabil Assist Technol. 2016. PMID: 25600057 Review.
-
Gamification and Control of Nitinol Based Ankle Rehabilitation Robot.Biomimetics (Basel). 2021 Sep 21;6(3):53. doi: 10.3390/biomimetics6030053. Biomimetics (Basel). 2021. PMID: 34562877 Free PMC article.
-
Bimanual elbow robotic orthoses: preliminary investigations on an impairment force-feedback rehabilitation method.Front Hum Neurosci. 2015 Mar 30;9:169. doi: 10.3389/fnhum.2015.00169. eCollection 2015. Front Hum Neurosci. 2015. PMID: 25870555 Free PMC article.
-
Safety Evaluation and Experimental Study of a New Bionic Muscle Cable-Driven Lower Limb Rehabilitation Robot.Sensors (Basel). 2020 Dec 8;20(24):7020. doi: 10.3390/s20247020. Sensors (Basel). 2020. PMID: 33302462 Free PMC article.
-
Rehabilitation robots for the treatment of sensorimotor deficits: a neurophysiological perspective.J Neuroeng Rehabil. 2018 Jun 5;15(1):46. doi: 10.1186/s12984-018-0383-x. J Neuroeng Rehabil. 2018. PMID: 29866106 Free PMC article. Review.
References
-
- Aguiar P. M., Burdet E., Caurin G. A. P. (2017). “Instrumented Module for Investigation of Contact Forces for Use in Rehabilitation and Assessment of Bimanual Functionalities,” in 24th ABCM International Congress of Mechanical Engineering.
-
- Alves T., Gonçalves R. S., Carbone G., Ceccarelli M. (2019). “Cable-Driven Robots for Circular Trajectory Exercises in Rehabilitation,” in 25th ABCM International Congress of Mechanical Engineering. Uberlândia, MG, Brazil.
-
- Appel V. C. R. (2014). “Classifying Emotions in Rehabilitation Robotics Based on Facial Skin Temperature,” in 5th IEEE RAS International Conference on Biomedical Robotics and Biomechatronics, 276.
LinkOut - more resources
Full Text Sources