

Affect-Driven Learning of Robot Behaviour for Collaborative Human-Robot Interactions
- PMID: 35265672
- PMCID: PMC8898942
- DOI: 10.3389/frobt.2022.717193
Affect-Driven Learning of Robot Behaviour for Collaborative Human-Robot Interactions
Abstract
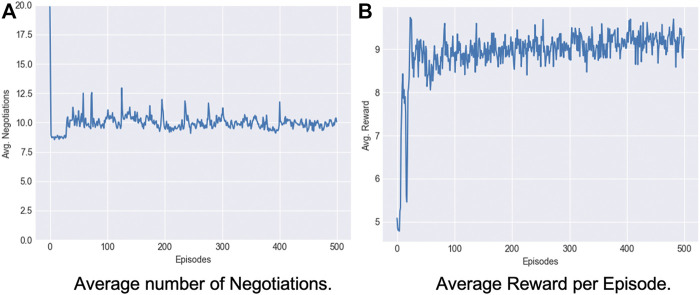
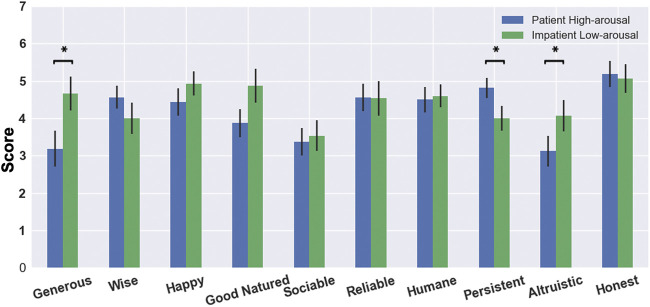
Collaborative interactions require social robots to share the users' perspective on the interactions and adapt to the dynamics of their affective behaviour. Yet, current approaches for affective behaviour generation in robots focus on instantaneous perception to generate a one-to-one mapping between observed human expressions and static robot actions. In this paper, we propose a novel framework for affect-driven behaviour generation in social robots. The framework consists of (i) a hybrid neural model for evaluating facial expressions and speech of the users, forming intrinsic affective representations in the robot, (ii) an Affective Core, that employs self-organising neural models to embed behavioural traits like patience and emotional actuation that modulate the robot's affective appraisal, and (iii) a Reinforcement Learning model that uses the robot's appraisal to learn interaction behaviour. We investigate the effect of modelling different affective core dispositions on the affective appraisal and use this affective appraisal as the motivation to generate robot behaviours. For evaluation, we conduct a user study (n = 31) where the NICO robot acts as a proposer in the Ultimatum Game. The effect of the robot's affective core on its negotiation strategy is witnessed by participants, who rank a patient robot with high emotional actuation higher on persistence, while an impatient robot with low emotional actuation is rated higher on its generosity and altruistic behaviour.
Keywords: core affect; human-robot interaction; multi-modal affect perception; neural networks; reinforcement learning.
Copyright © 2022 Churamani, Barros, Gunes and Wermter.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest. The handling Editor is currently co-organizing a Research Topic with one of the authors PB and declared a past collaboration with one of the authors HG.
Figures






Similar articles
-
Real-time emotion generation in human-robot dialogue using large language models.Front Robot AI. 2023 Dec 1;10:1271610. doi: 10.3389/frobt.2023.1271610. eCollection 2023. Front Robot AI. 2023. PMID: 38106543 Free PMC article.
-
Freedom comes at a cost?: An exploratory study on affordances' impact on users' perception of a social robot.Front Robot AI. 2024 Mar 18;11:1288818. doi: 10.3389/frobt.2024.1288818. eCollection 2024. Front Robot AI. 2024. PMID: 38562409 Free PMC article.
-
Evaluating the effects of active social touch and robot expressiveness on user attitudes and behaviour in human-robot interaction.Sci Rep. 2025 May 27;15(1):18483. doi: 10.1038/s41598-025-01490-5. Sci Rep. 2025. PMID: 40425668 Free PMC article.
-
Ergonomic human-robot collaboration in industry: A review.Front Robot AI. 2023 Jan 3;9:813907. doi: 10.3389/frobt.2022.813907. eCollection 2022. Front Robot AI. 2023. PMID: 36743294 Free PMC article. Review.
-
AI-assisted flexible electronics in humanoid robot heads for natural and authentic facial expressions.Innovation (Camb). 2025 Jan 12;6(2):100752. doi: 10.1016/j.xinn.2024.100752. eCollection 2025 Feb 3. Innovation (Camb). 2025. PMID: 39991473 Free PMC article. Review.
Cited by
-
Is It Me or the Robot? A Critical Evaluation of Human Affective State Recognition in a Cognitive Task.Front Neurorobot. 2022 Aug 1;16:882483. doi: 10.3389/fnbot.2022.882483. eCollection 2022. Front Neurorobot. 2022. PMID: 35978569 Free PMC article.
-
Towards a Personality AI for Robots: Potential Colony Capacity of a Goal-Shaped Generative Personality Model When Used for Expressing Personalities via Non-Verbal Behaviour of Humanoid Robots.Front Robot AI. 2022 May 11;9:728776. doi: 10.3389/frobt.2022.728776. eCollection 2022. Front Robot AI. 2022. PMID: 35634263 Free PMC article.
-
Augmenting ECG Data with Multiple Filters for a Better Emotion Recognition System.Arab J Sci Eng. 2023 Jan 11:1-22. doi: 10.1007/s13369-022-07585-9. Online ahead of print. Arab J Sci Eng. 2023. PMID: 36685996 Free PMC article.
References
-
- Ahn H., Picard R. W. (2005). “Affective-cognitive Learning and Decision Making: A Motivational Reward Framework for Affective Agents,” in Affective Computing and Intelligent Interaction. Editors Tao J., Tan T., Picard R. (Berlin: Springer Berlin Heidelberg; ), 866–873. 10.1007/11573548_111 - DOI
-
- Barros P., Barakova E., Wermter S. (2020). Adapting the Interplay between Personalized and Generalized Affect Recognition Based on an Unsupervised Neural Framework. IEEE Trans. Affective Comput. 10.1109/taffc.2020.3002657 - DOI
-
- Barros P., Churamani N., Lakomkin E., Sequeira H., Sutherland A., Wermter S. (2018). “The OMG-Emotion Behavior Dataset,” in International Joint Conference on Neural Networks (IJCNN) (Rio de Janeiro, Brazil: IEEE; ), 1408–1414. 10.1109/ijcnn.2018.8489099 - DOI
LinkOut - more resources
Full Text Sources