

Parallel Cooperative Coevolutionary Grey Wolf Optimizer for Path Planning Problem of Unmanned Aerial Vehicles
- PMID: 35270978
- PMCID: PMC8914685
- DOI: 10.3390/s22051826
Parallel Cooperative Coevolutionary Grey Wolf Optimizer for Path Planning Problem of Unmanned Aerial Vehicles
Abstract
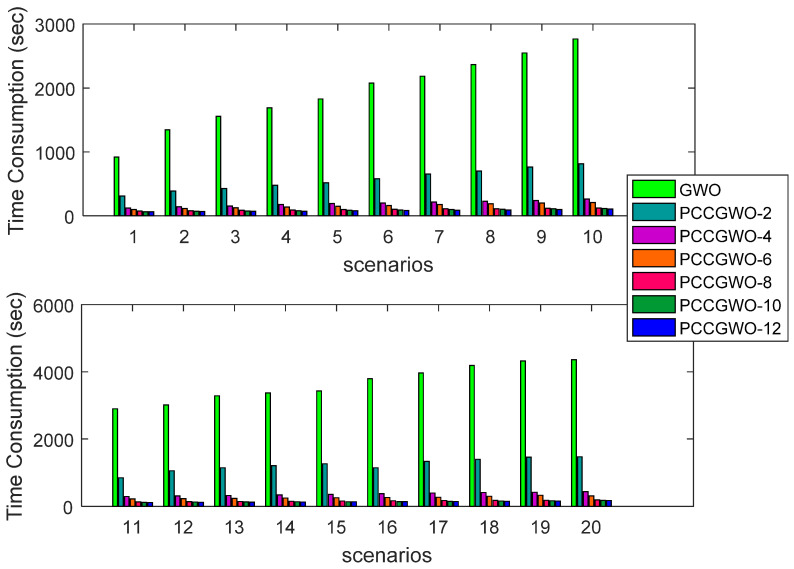
The path planning of Unmanned Aerial Vehicles (UAVs) is a complex and hard task that can be formulated as a Large-Scale Global Optimization (LSGO) problem. A higher partition of the flight environment leads to an increase in route's accuracy but at the expense of greater planning complexity. In this paper, a new Parallel Cooperative Coevolutionary Grey Wolf Optimizer (PCCGWO) is proposed to solve such a planning problem. The proposed PCCGWO metaheuristic applies cooperative coevolutionary concepts to ensure an efficient partition of the original search space into multiple sub-spaces with reduced dimensions. The decomposition of the decision variables vector into several sub-components is achieved and multi-swarms are created from the initial population. Each sub-swarm is then assigned to optimize a part of the LSGO problem. To form the complete solution, the representatives from each sub-swarm are combined. To reduce the computation time, an efficient parallel master-slave model is introduced in the proposed parameters-free PCCGWO. The master will be responsible for decomposing the original problem and constructing the context vector which contains the complete solution. Each slave is designed to evolve a sub-component and will send the best individual as its representative to the master after each evolutionary cycle. Demonstrative results show the effectiveness and superiority of the proposed PCCGWO-based planning technique in terms of several metrics of performance and nonparametric statistical analyses. These results show that the increase in the number of slaves leads to a more efficient result as well as a further improved computational time.
Keywords: Friedman statistical analyses; cooperative coevolutionary algorithms; grey wolf optimizer; large-scale global optimization; parallel master-slave model; paths planning; unmanned aerial vehicles.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










References
-
- Mukhamediev R.I., Symagulov A., Kuchin Y., Zaitseva E., Bekbotayeva A., Yakunin K., Assanov I., Levashenko V., Popova Y., Akzhalova A., et al. Review of Some Applications of Unmanned Aerial Vehicles Technology in the Resource-Rich Country. Appl. Sci. 2021;11:10171. doi: 10.3390/app112110171. - DOI
-
- Rodríguez M.V., Melgar S.G., Cordero A.S., Márquez J.M.A. A Critical Review of Unmanned Aerial Vehicles (UAVs) Use in Architecture and Urbanism: Scientometric and Bibliometric Analysis. Appl. Sci. 2021;11:9966. doi: 10.3390/app11219966. - DOI
-
- Khelifi A., Ciccone G., Altaweel M., Basmaji T., Ghazal M. Autonomous Service Drones for Multimodal Detection and Monitoring of Archaeological Sites. Appl. Sci. 2021;11:10424. doi: 10.3390/app112110424. - DOI
-
- Gao X., Hou Z., Zhu X.F., Zhang J.T., Chen X.Q. The shortest path planning for manoeuvres of UAV. Acta Polytech. Hungarica. 2013;10:221–239.
LinkOut - more resources
Full Text Sources
