

An aquatic microrobot for microscale flow manipulation
- PMID: 35322052
- PMCID: PMC8942993
- DOI: 10.1038/s41598-022-07938-2
An aquatic microrobot for microscale flow manipulation
Abstract
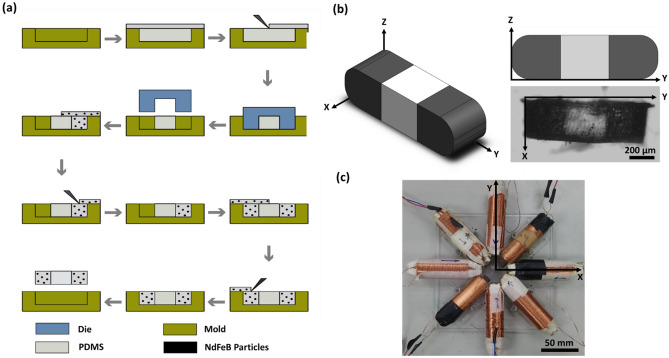
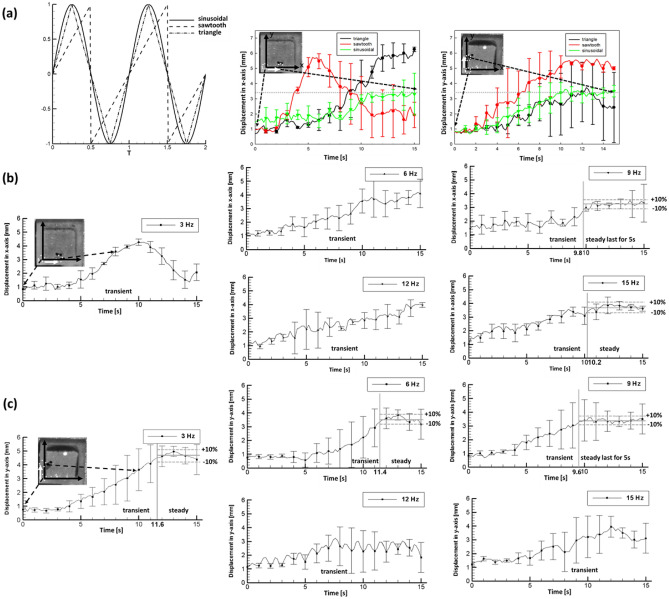
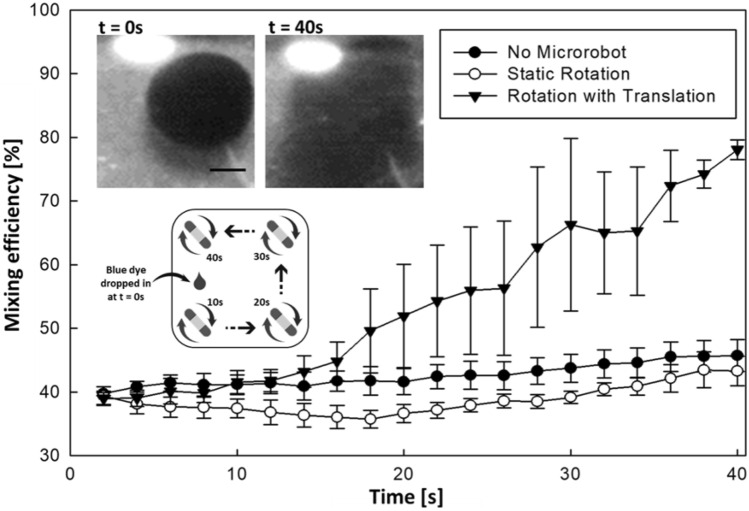
Microrobots have been developed and extensively employed for performing the variety tasks with various applications. However, the intricate fabrication and actuation processes employed for microrobots further restrict their multitudinous applicability as well as the controllability in high accuracy. As an alternative, in this work an aquatic microrobot was developed using a distinctive concept of the building block technique where the microrobot was built based on the block to block design. An in-house electromagnetic system as well as the control algorithm were developed to achieve the precise real-time dynamics of the microrobot for extensive applications. In addition, pivotal control parameters of the microrobot including the actuating waveforms together with the operational parameters were verified and discussed in conjunction with the magnetic intensity simulation. A mixing task was performed with high efficiency based on the trajectory planning and rotation control of the microrobot to demonstrate its capability in flow manipulation which can be advantageous for microreactor applications down the load. Aside from it, a dissolution test was further conducted to provide an on-demand flow agitation function of the microrobot for the next level of lab chip applications. The presented work with detail dynamic analysis is envisaged to provide a new look of microrobot control and functions from the engineering perspective with profoundly potential applications.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Yan X, et al. Multifunctional biohybrid magnetite microrobots for imaging-guided therapy. Sci. Robot. 2017;1155:1–15. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
