

Characterizing the performance of human leg external force control
- PMID: 35322065
- PMCID: PMC8943015
- DOI: 10.1038/s41598-022-08755-3
Characterizing the performance of human leg external force control
Abstract
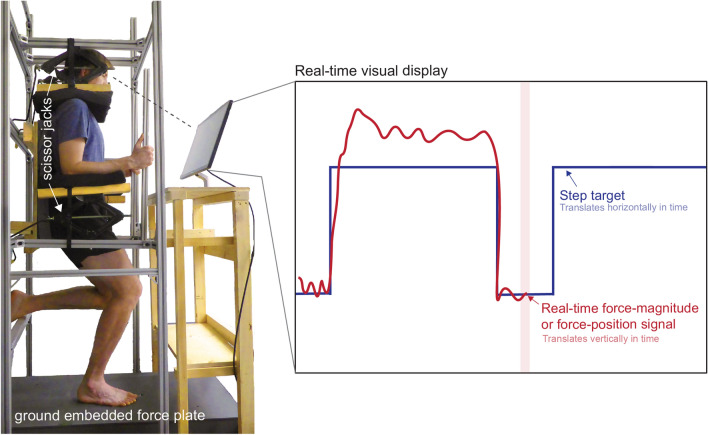
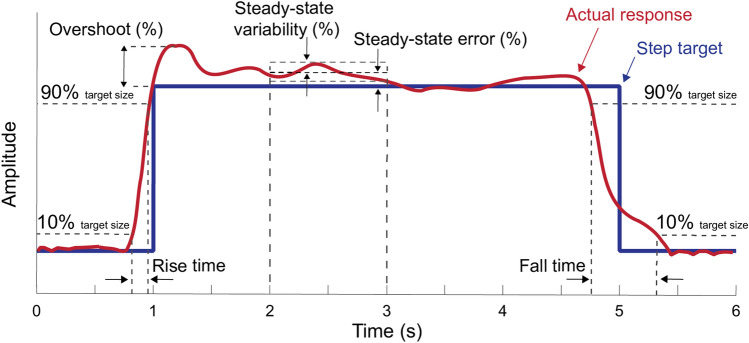
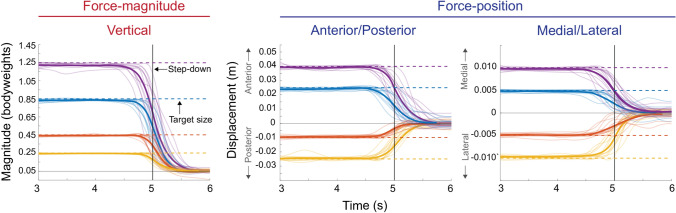
Our legs act as our primary contact with the surrounding environment, generating external forces that enable agile motion. To be agile, the nervous system has to control both the magnitude of the force that the feet apply to the ground and the point of application of this force. The purpose of this study was to characterize the performance of the healthy human neuromechanical system in controlling the force-magnitude and position of an externally applied force. To accomplish this, we built an apparatus that immobilized participants but allowed them to exert variable but controlled external forces with a single leg onto a ground embedded force plate. We provided real-time visual feedback of either the leg force-magnitude or force-position that participants were exerting against the force platform and instructed participants to best match their real-time signal to prescribed target step functions. We tested target step functions of a range of sizes and quantified the responsiveness and accuracy of the control. For the control of force-magnitude and for intermediate step sizes of 0.45 bodyweights, we found a bandwidth of 1.8 ± 0.5 Hz, a steady-state error of 2.6 ± 0.9%, and a steady-state variability of 2.7 ± 0.9%. We found similar control performance in terms of responsiveness and accuracy across step sizes and between force-magnitude and position control. Increases in responsiveness correlated with reductions in other measures of control performance, such as a greater magnitude of overshooting. We modelled the observed control performance and found that a second-order model was a good predictor of external leg force control. We discuss how benchmarking force control performance in young healthy humans aids in understanding differences in agility between humans, between humans and other animals, and between humans and engineered systems.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- J. Hwangbo, J. Lee, A. Dosovitskiy, D. Bellicoso, V. Tsounis, V. Koltun, & M. Hutter. Learning agile and dynamic motor skills for legged robots. Sci. Robot. 4(26) (2019). - PubMed
-
- Asadi A. Relationship between jumping ability, agility and sprint performance of elite young basketball players: A field-test approach. Braz. J. Kinanthropometry Hum. Performance. 2016;18(2):177. doi: 10.5007/1980-0037.2016v18n2p177. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
