

A Bio-Inspired Mechanism for Learning Robot Motion From Mirrored Human Demonstrations
- PMID: 35360830
- PMCID: PMC8963868
- DOI: 10.3389/fnbot.2022.826410
A Bio-Inspired Mechanism for Learning Robot Motion From Mirrored Human Demonstrations
Abstract
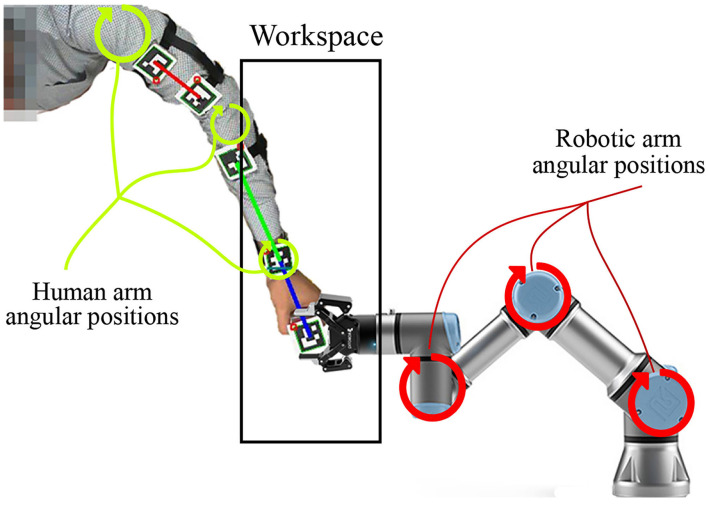
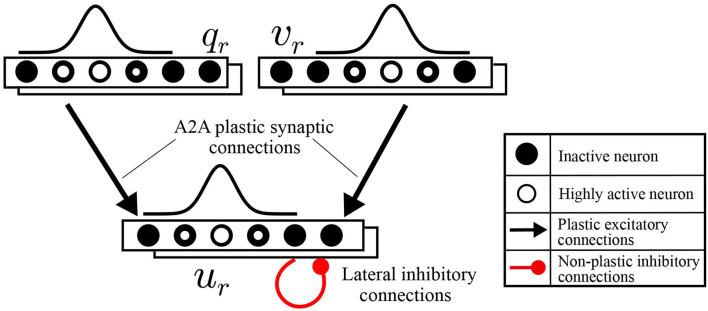
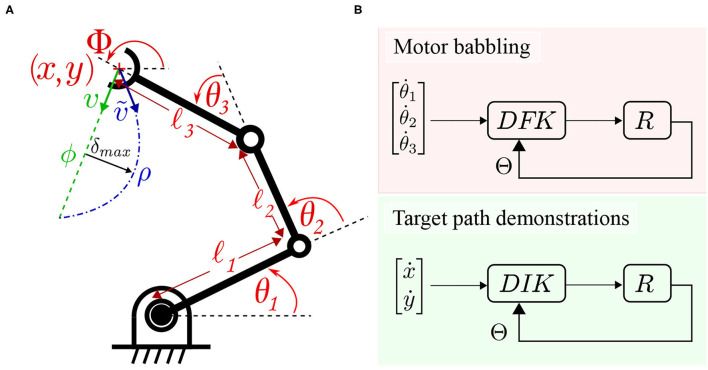
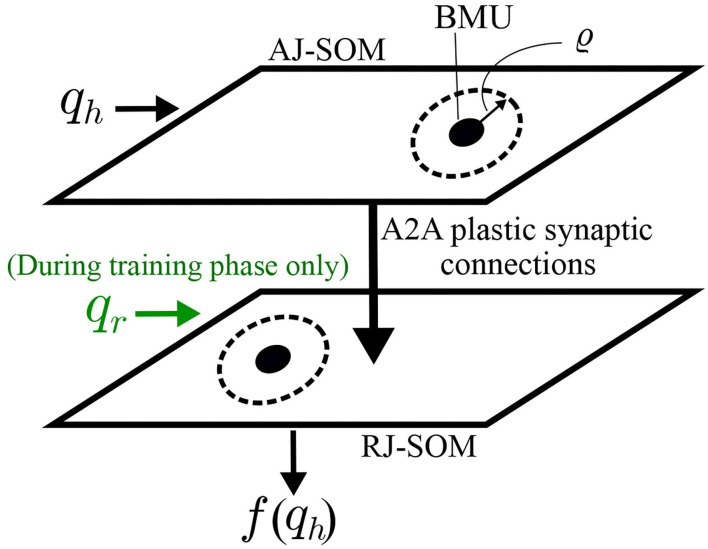
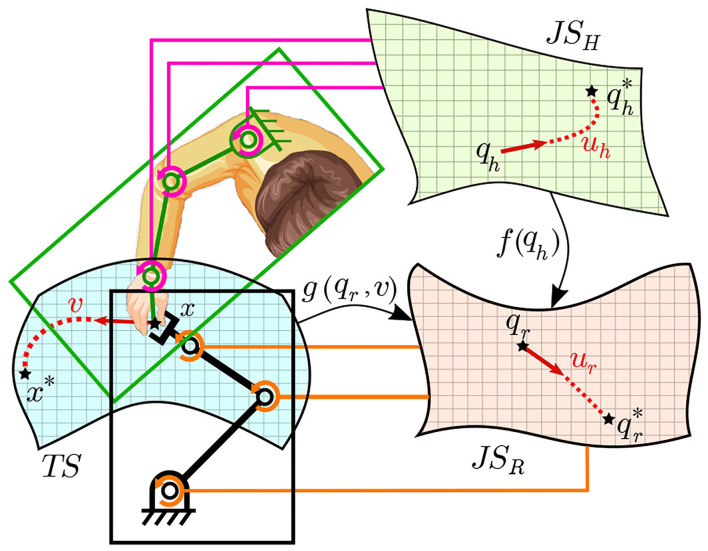
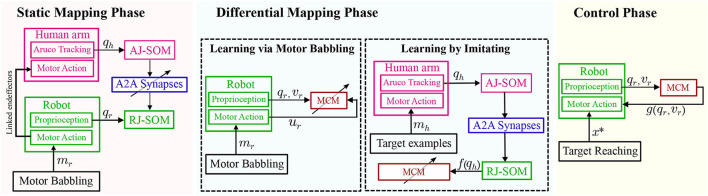
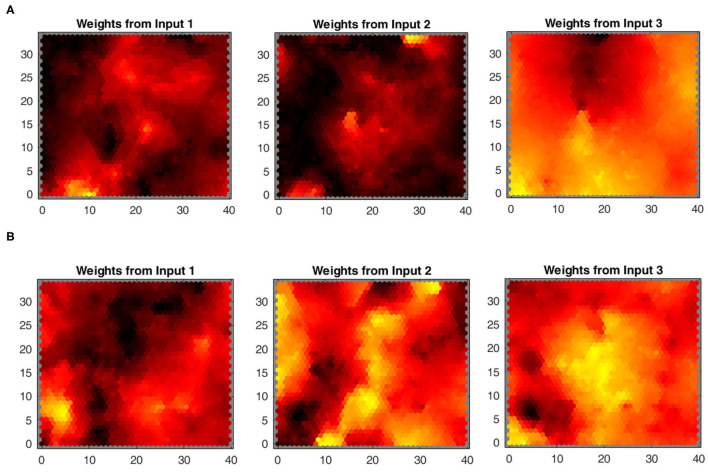
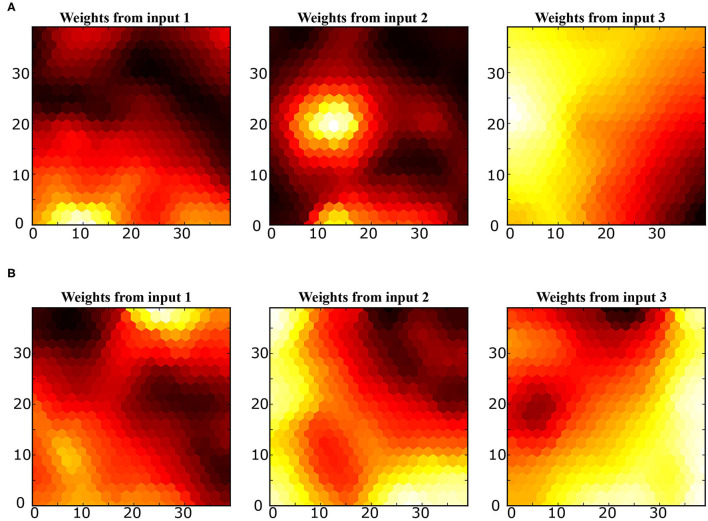
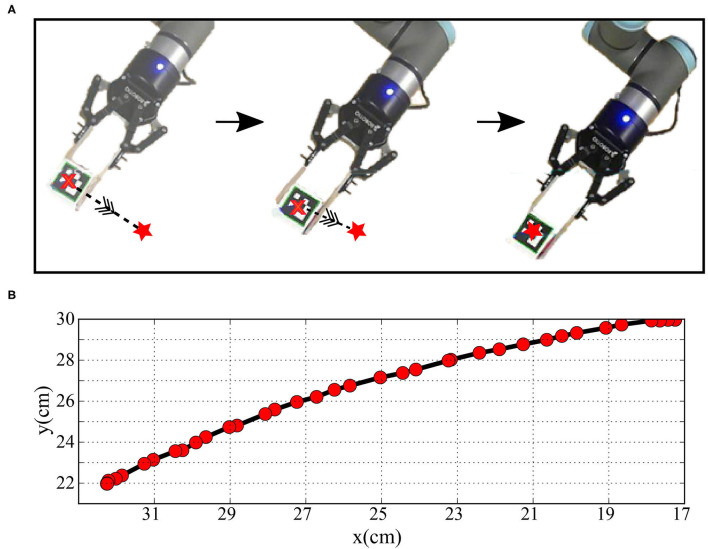
Different learning modes and mechanisms allow faster and better acquisition of skills as widely studied in humans and many animals. Specific neurons, called mirror neurons, are activated in the same way whether an action is performed or simply observed. This suggests that observing others performing movements allows to reinforce our motor abilities. This implies the presence of a biological mechanism that allows creating models of others' movements and linking them to the self-model for achieving mirroring. Inspired by such ability, we propose to build a map of movements executed by a teaching agent and mirror the agent's state to the robot's configuration space. Hence, in this study, a neural network is proposed to integrate a motor cortex-like differential map transforming motor plans from task-space to joint-space motor commands and a static map correlating joint-spaces of the robot and a teaching agent. The differential map is developed based on spiking neural networks while the static map is built as a self-organizing map. The developed neural network allows the robot to mirror the actions performed by a human teaching agent to its own joint-space and the reaching skill is refined by the complementary examples provided. Hence, experiments are conducted to quantify the improvement achieved thanks to the proposed learning approach and control scheme.
Keywords: imitation learning; robotics; sensor-based control; spiking neural networks; visual servoing.
Copyright © 2022 Zahra, Tolu, Zhou, Duan and Navarro-Alarcon.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures
References
-
- Amari S., et al. (2003). The Handbook of Brain Theory and Neural Networks. MIT Press.
-
- Argall B. D., Chernova S., Veloso M., Browning B. (2009). A survey of robot learning from demonstration. Robot. Auton. Syst. 57, 469–483. 10.1016/j.robot.2008.10.024 - DOI
-
- Arsenault B. (2018). Adaptive tree parzen estimator. Available online at: https://github.com/electricbrainio
-
- Bergstra J., Bardenet R., Bengio Y., Kégl B. (2011). Algorithms for hyper-parameter optimization, in 25th Annual Conference on Neural Information Processing Systems (NIPS 2011), vol. 24 (Red Hook, NY: Neural Information Processing Systems Foundation; ).
LinkOut - more resources
Full Text Sources