

SLEAP: A deep learning system for multi-animal pose tracking
- PMID: 35379947
- PMCID: PMC9007740
- DOI: 10.1038/s41592-022-01426-1
SLEAP: A deep learning system for multi-animal pose tracking
Erratum in
-
Publisher Correction: SLEAP: A deep learning system for multi-animal pose tracking.Nat Methods. 2022 May;19(5):628. doi: 10.1038/s41592-022-01495-2. Nat Methods. 2022. PMID: 35468969 Free PMC article. No abstract available.
Abstract
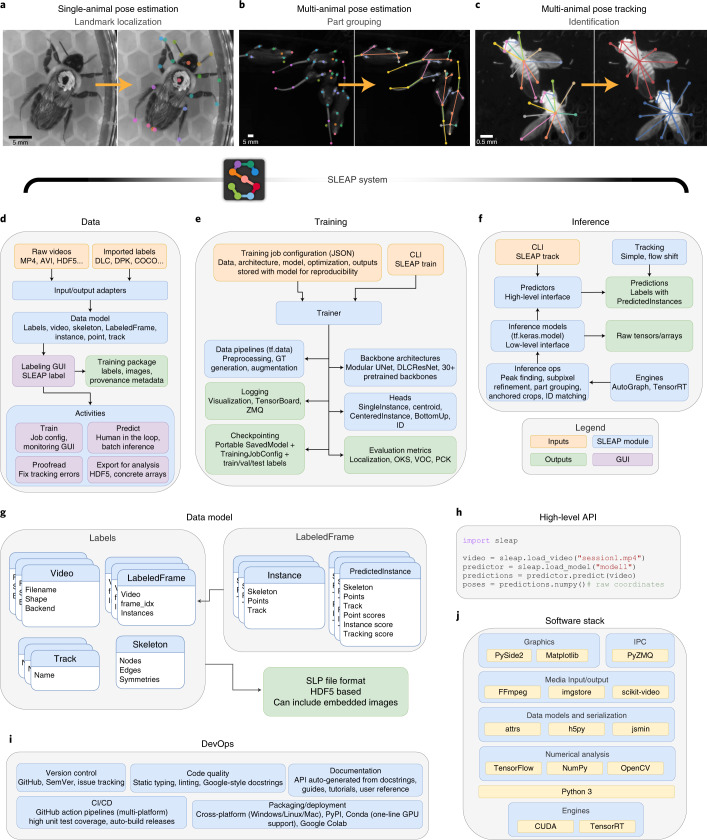
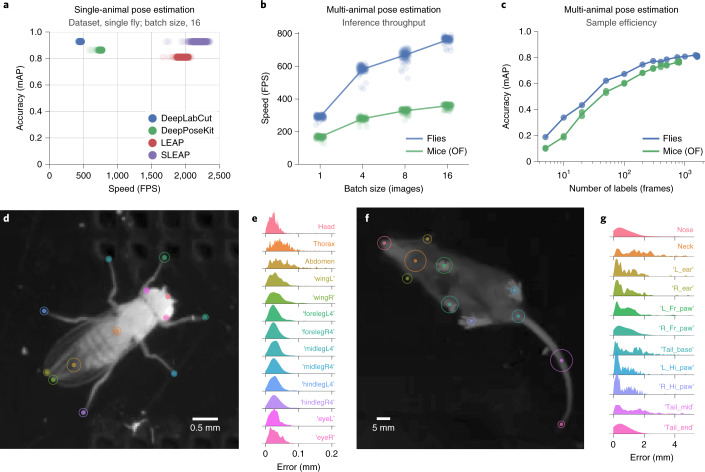
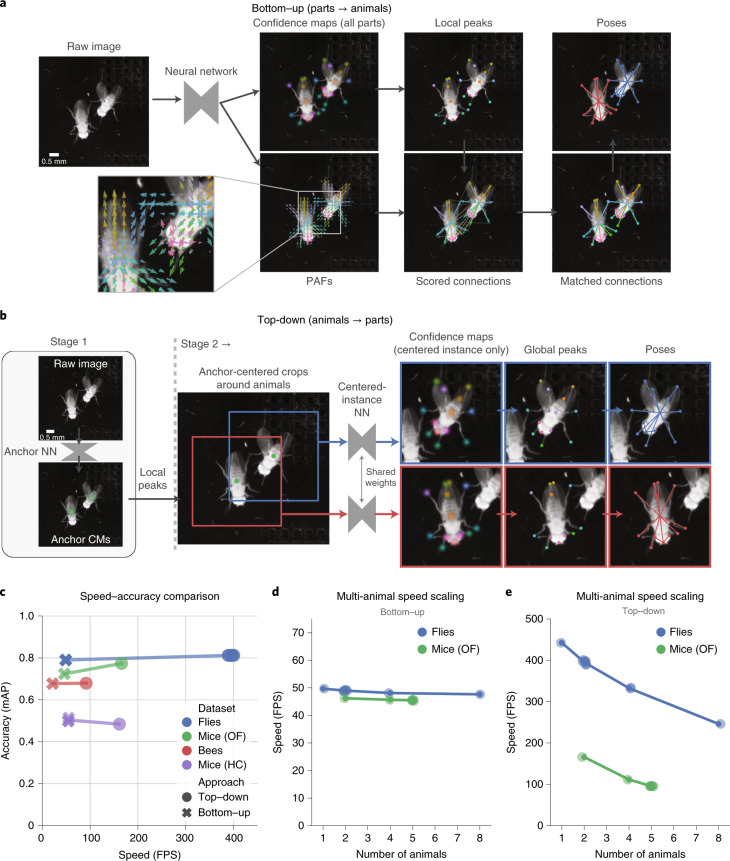
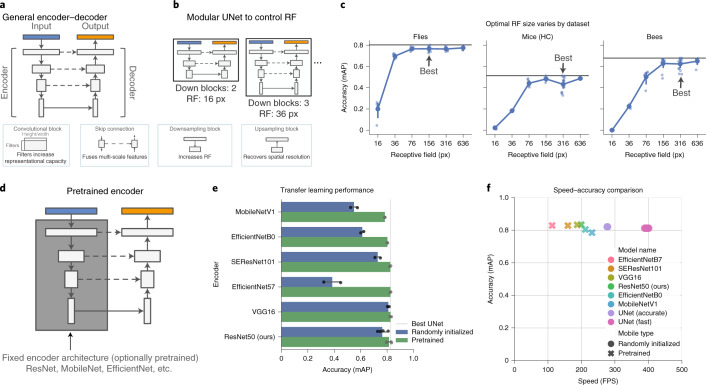
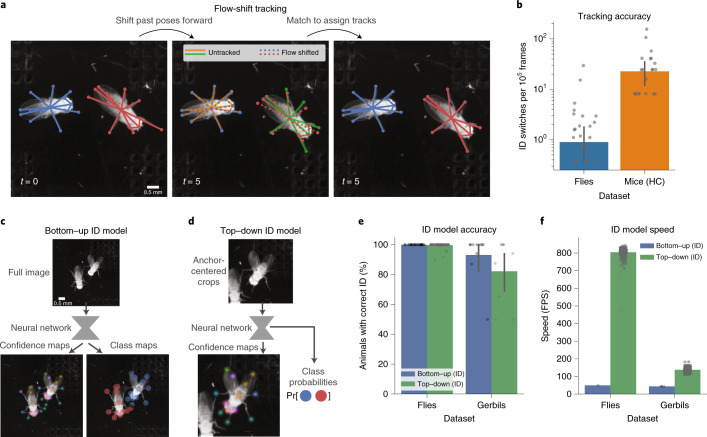
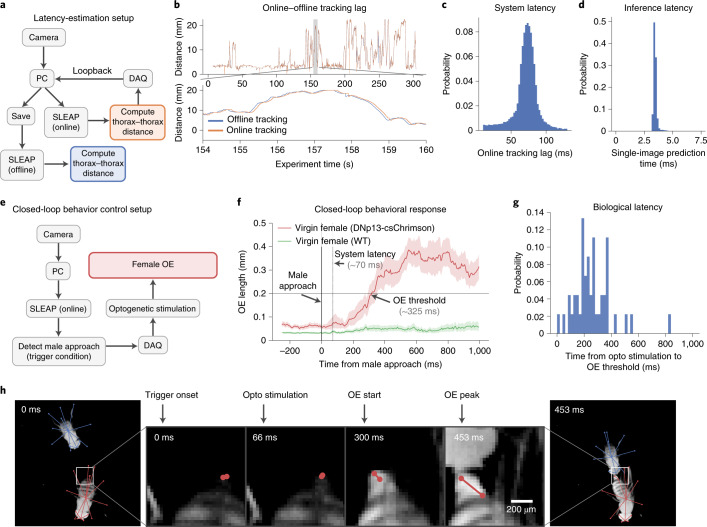
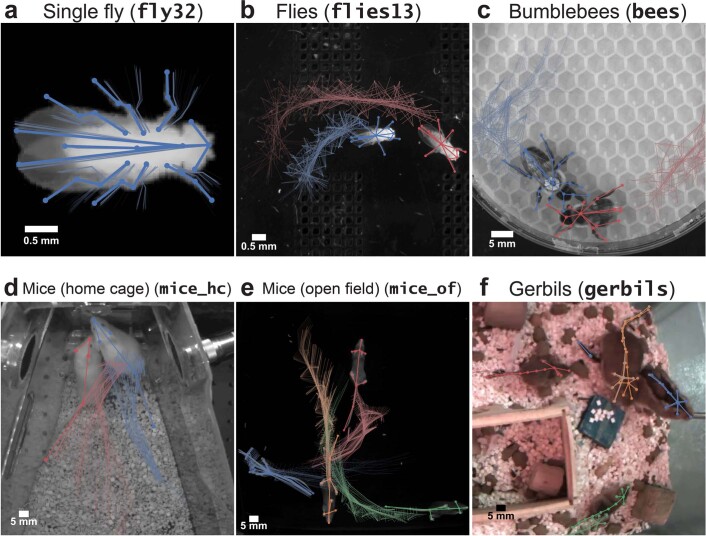
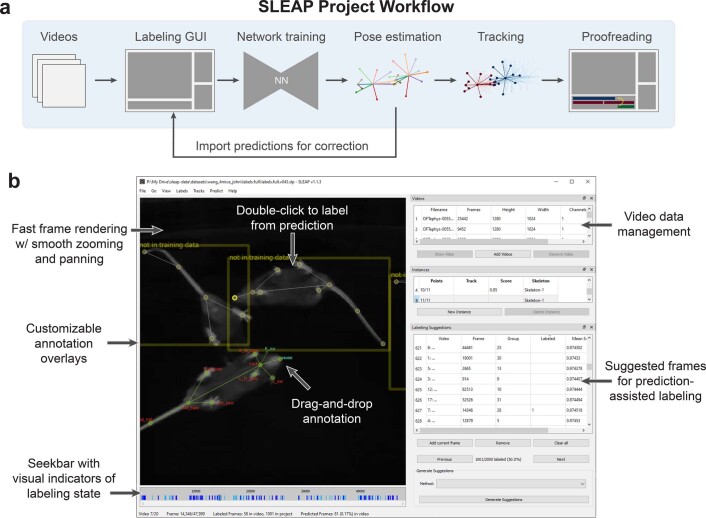
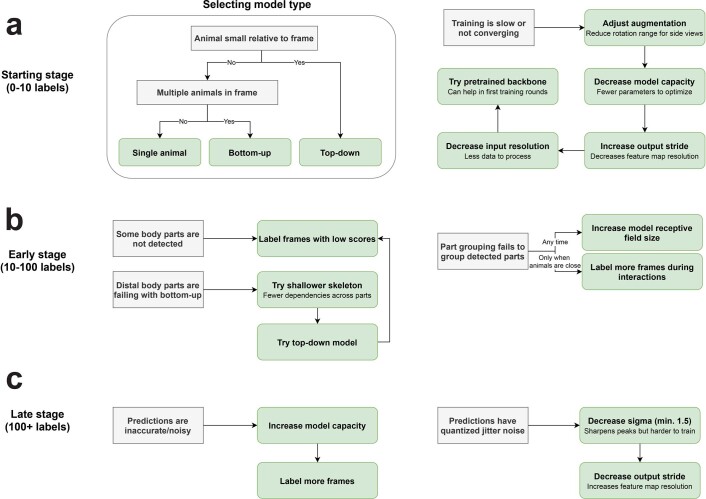
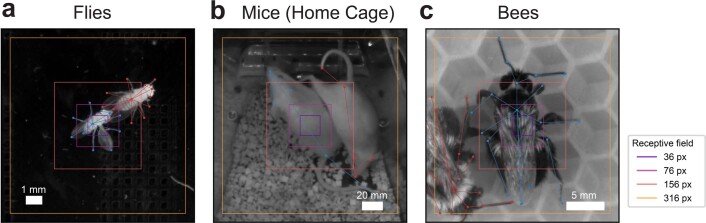
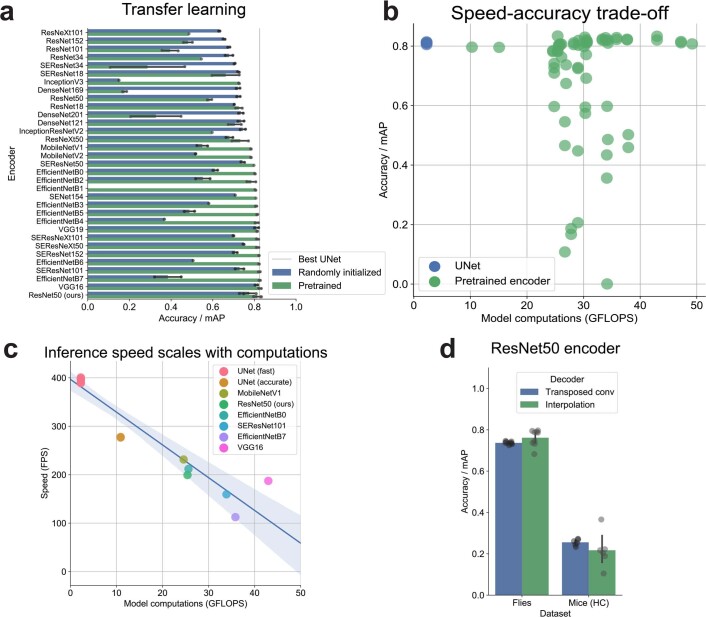
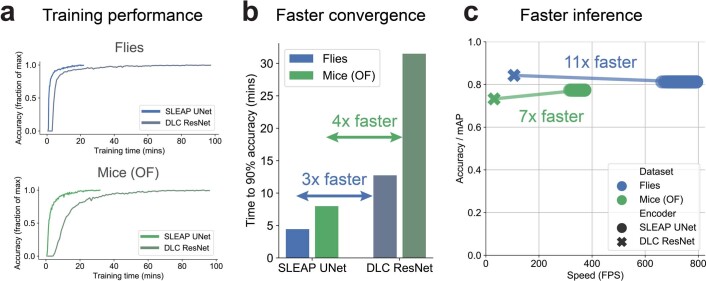
The desire to understand how the brain generates and patterns behavior has driven rapid methodological innovation in tools to quantify natural animal behavior. While advances in deep learning and computer vision have enabled markerless pose estimation in individual animals, extending these to multiple animals presents unique challenges for studies of social behaviors or animals in their natural environments. Here we present Social LEAP Estimates Animal Poses (SLEAP), a machine learning system for multi-animal pose tracking. This system enables versatile workflows for data labeling, model training and inference on previously unseen data. SLEAP features an accessible graphical user interface, a standardized data model, a reproducible configuration system, over 30 model architectures, two approaches to part grouping and two approaches to identity tracking. We applied SLEAP to seven datasets across flies, bees, mice and gerbils to systematically evaluate each approach and architecture, and we compare it with other existing approaches. SLEAP achieves greater accuracy and speeds of more than 800 frames per second, with latencies of less than 3.5 ms at full 1,024 × 1,024 image resolution. This makes SLEAP usable for real-time applications, which we demonstrate by controlling the behavior of one animal on the basis of the tracking and detection of social interactions with another animal.
© 2022. The Author(s).
Conflict of interest statement
A pending patent application (US application 17/282,818) was filed on 5 April 2021 by Princeton University on behalf of the inventors (T.D.P., J.W.S. and M.M.) on the system described here for multi-animal pose tracking. The remaining authors declare no competing interests.
Figures
Comment in
-
Tracking together: estimating social poses.Nat Methods. 2022 Apr;19(4):410-411. doi: 10.1038/s41592-022-01452-z. Nat Methods. 2022. PMID: 35414127 No abstract available.
References
-
- Christin S, Hervet É, Lecomte N. Applications for deep learning in ecology. Methods Ecol. Evol. 2019;10:1632–1644. doi: 10.1111/2041-210X.13256. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
