

Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing
- PMID: 35388640
- PMCID: PMC9189663
- DOI: 10.1002/advs.202104382
Glowing Sucker Octopus (Stauroteuthis syrtensis)-Inspired Soft Robotic Gripper for Underwater Self-Adaptive Grasping and Sensing
Abstract
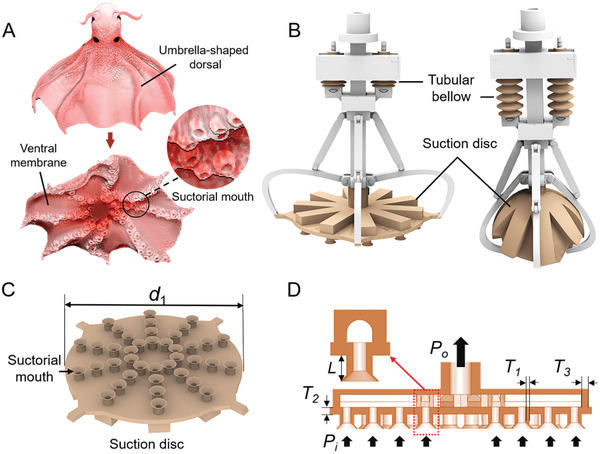
A soft gripper inspired by the glowing sucker octopus (Stauroteuthis syrtensis)' highly evolved grasping capability enabled by the umbrella-shaped dorsal and ventral membrane between each arm is presented here, comprising of a 3D-printed linkage mechanism used to actuate a modular mold silicone-casting soft suction disc to deform. The soft gripper grasp can lift objects using the suction generated by the pump in the soft disc. Moreover, the protruded funnel-shaped end of the deformed suctorial mouth can adapt to smooth and rough surfaces. Furthermore, when the gripper contacts the submerged target objects in a turbid environment, local suctorial mouth arrays on the suction disc are locked, causing the variable flow inside them, which can be detected as a tactile perception signal to the target objects instead of visual perception. Aided by the 3D-printed linkage mechanism, the soft gripper can grasp objects of different shapes and dimensions, including flat objects, objects beyond the grasping range, irregular objects, scattered objects, and a moving turtle. The results report the soft gripper's versatility and demonstrate the vast application potentials of self-adaptive grasping and sensing in various environments, including but are not limited to underwater, which is always a key challenge of grasping technology.
Keywords: bioinspiration; glowing sucker octopus; self-adaptive grasping; soft gripper.
© 2022 The Authors. Advanced Science published by Wiley-VCH GmbH.
Conflict of interest statement
The authors declare no conflict of interest.
Figures







References
-
- Stuart H. S., Wang S. Q., Gardineer B., Christensen D. L., Aukes D. M., Cutkosky M., IEEE Int. Conf. Rob. Autom. IEEE, New York: 2014, p. 6691.
-
- Barratt D. M., Harch P. G., Van Meter K., Neurologist 2002, 8, 186. - PubMed
-
- Gong Z. Y., Fang X., Chen X. Y., Cheng J. H., Xie Z. X., Liu J. Q., Chen B. H., Yang H., Kong S. H., Hao Y. F., Wang T. M., Yu J. Z., Wen L., Int. J. Rob. Res. 2021, 40, 449.
-
- Rus D., Tolley M. T., Nature 2015, 521, 467. - PubMed
-
- Siciliano B., Khatib O., Springer Handbook of Robotics, Springer, Berlin‐Heidelberg, Germany: 2008.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources