

Microscopic artificial cilia - a review
- PMID: 35403636
- PMCID: PMC9063641
- DOI: 10.1039/d1lc01168e
Microscopic artificial cilia - a review
Abstract
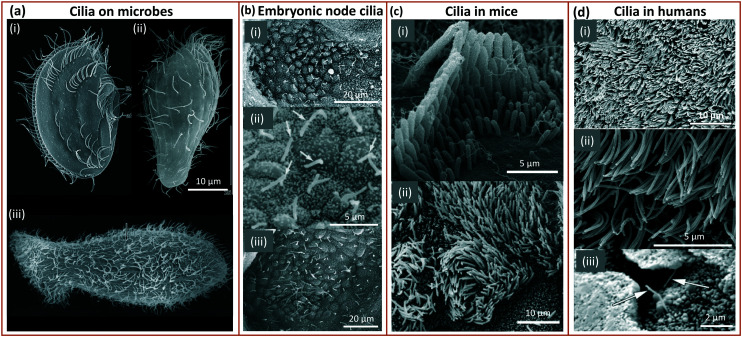
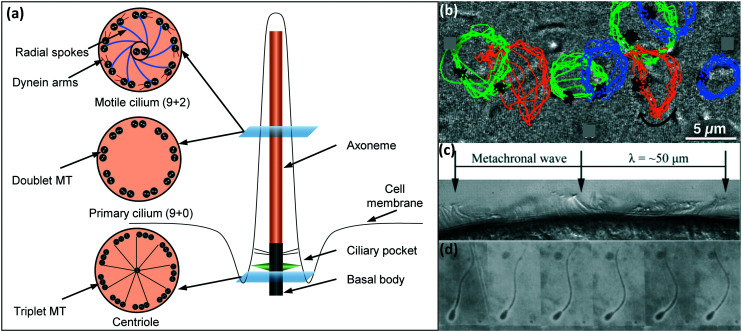
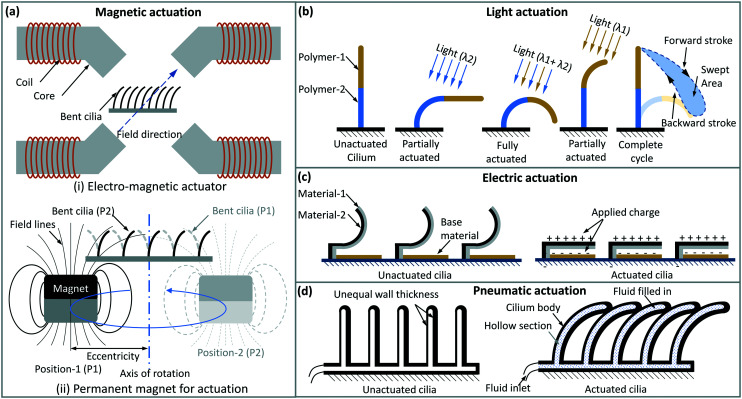
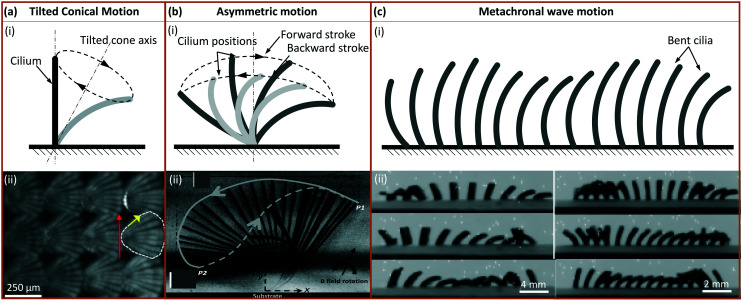
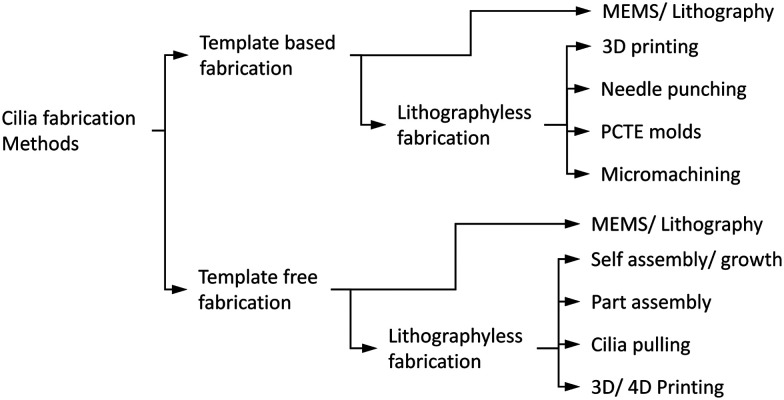
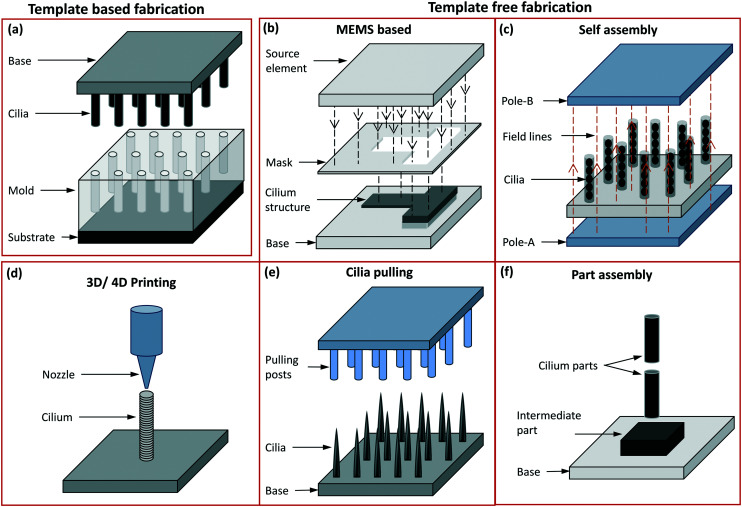
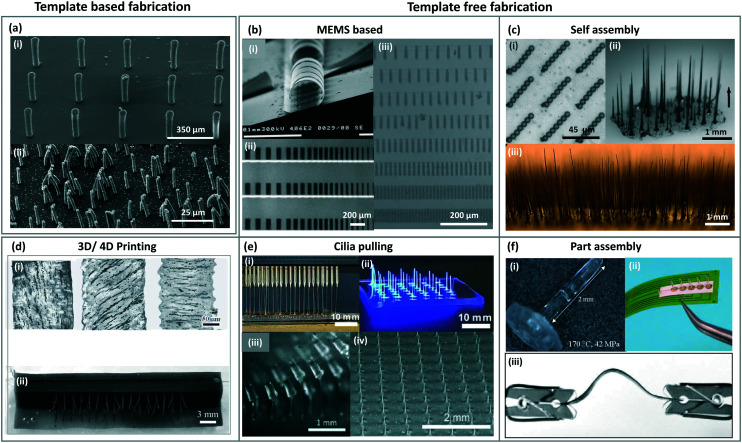
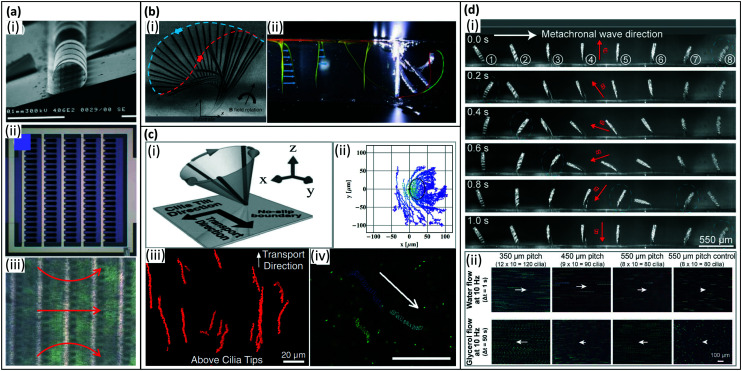
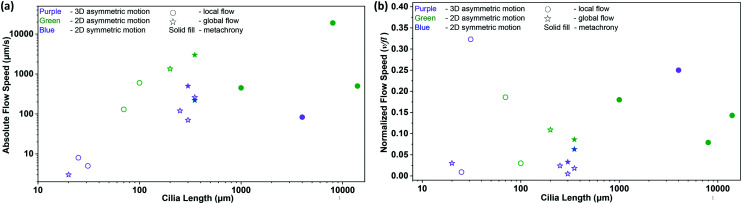
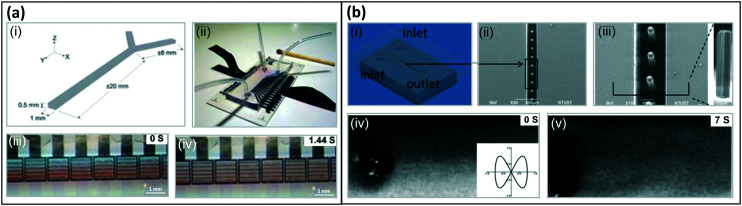
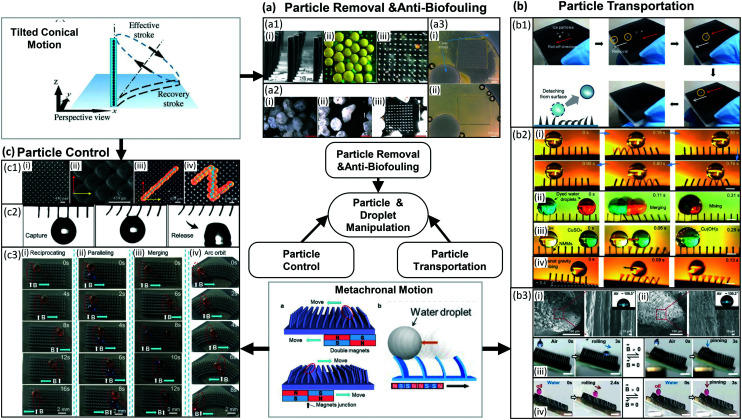
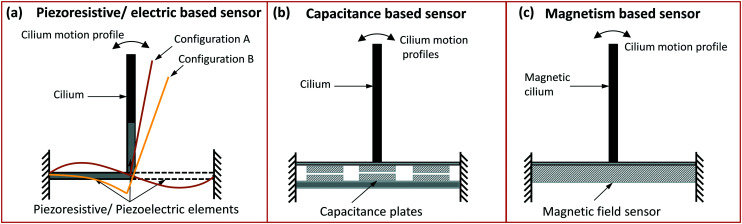
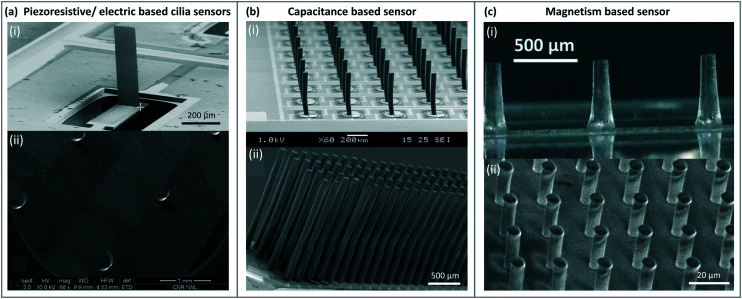
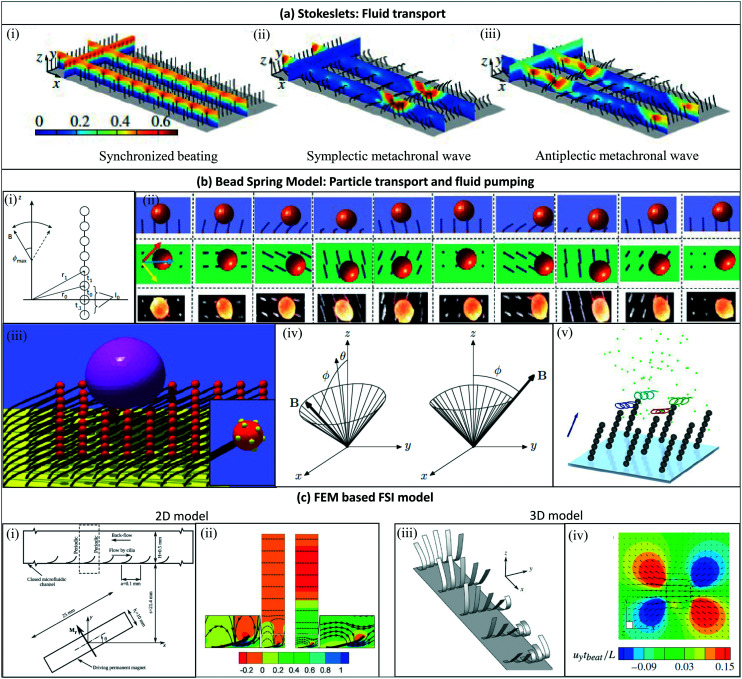
Cilia are microscopic hair-like external cell organelles that are ubiquitously present in nature, also within the human body. They fulfill crucial biological functions: motile cilia provide transportation of fluids and cells, and immotile cilia sense shear stress and concentrations of chemical species. Inspired by nature, scientists have developed artificial cilia mimicking the functions of biological cilia, aiming at application in microfluidic devices like lab-on-chip or organ-on-chip. By actuating the artificial cilia, for example by a magnetic field, an electric field, or pneumatics, microfluidic flow can be generated and particles can be transported. Other functions that have been explored are anti-biofouling and flow sensing. We provide a critical review of the progress in artificial cilia research and development as well as an evaluation of its future potential. We cover all aspects from fabrication approaches, actuation principles, artificial cilia functions - flow generation, particle transport and flow sensing - to applications. In addition to in-depth analyses of the current state of knowledge, we provide classifications of the different approaches and quantitative comparisons of the results obtained. We conclude that artificial cilia research is very much alive, with some concepts close to industrial implementation, and other developments just starting to open novel scientific opportunities.
Conflict of interest statement
There are no conflicts to declare.
Figures
References
-
- Sleigh M., Cilia and flagella, Academic Press, 1974
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous