

Radiation and Dust Sensor for Mars Environmental Dynamic Analyzer Onboard M2020 Rover
- PMID: 35458893
- PMCID: PMC9029032
- DOI: 10.3390/s22082907
Radiation and Dust Sensor for Mars Environmental Dynamic Analyzer Onboard M2020 Rover
Abstract
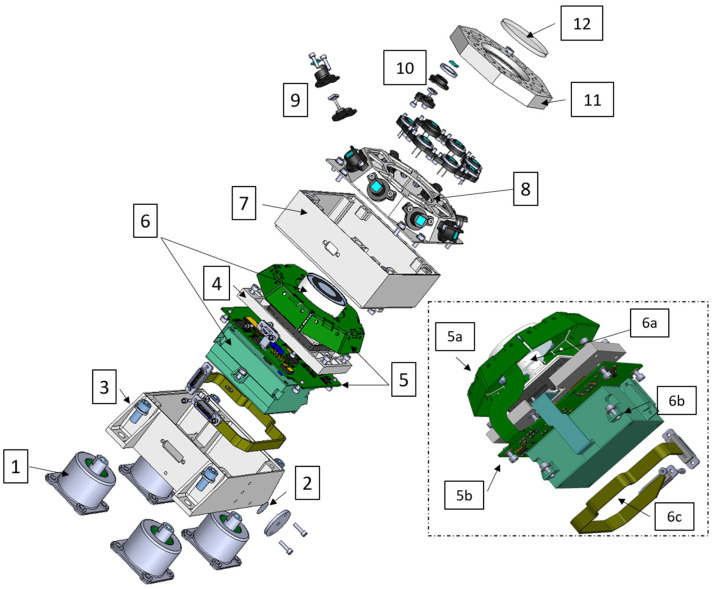
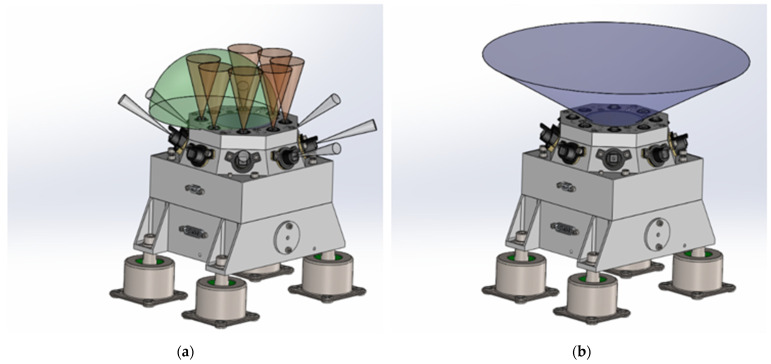
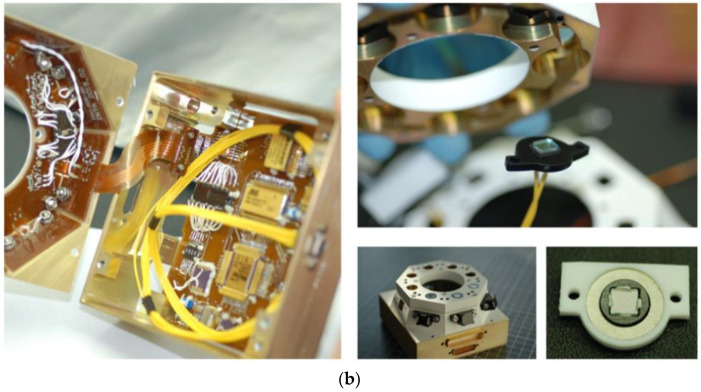
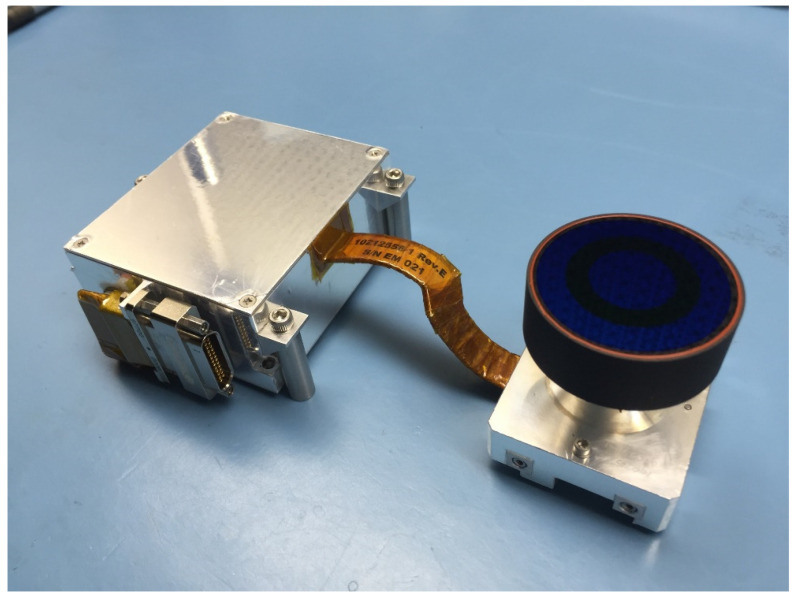
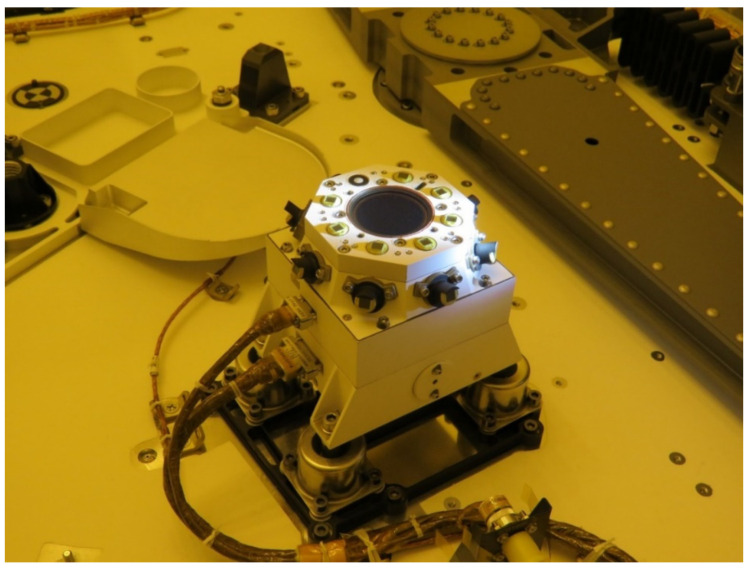
The Radiation and Dust Sensor is one of six sensors of the Mars Environmental Dynamics Analyzer onboard the Perseverance rover from the Mars 2020 NASA mission. Its primary goal is to characterize the airbone dust in the Mars atmosphere, inferring its concentration, shape and optical properties. Thanks to its geometry, the sensor will be capable of studying dust-lifting processes with a high temporal resolution and high spatial coverage. Thanks to its multiwavelength design, it will characterize the solar spectrum from Mars' surface. The present work describes the sensor design from the scientific and technical requirements, the qualification processes to demonstrate its endurance on Mars' surface, the calibration activities to demonstrate its performance, and its validation campaign in a representative Mars analog. As a result of this process, we obtained a very compact sensor, fully digital, with a mass below 1 kg and exceptional power consumption and data budget features.
Keywords: MEDA; Mars; Mars 2020; RDS; atmosphere; clouds; dust; instrumentation; ozone.
Conflict of interest statement
Laurent Bastide, Miguel González-Guerrero, Paula Manzano, Roser Urqui—External Consultor at INTA. Francisco Javier Alvarez-Rios, Javier Manzano, Sergio Aparicio—Formerly at INTA.
Figures
References
-
- Farley K.A., Williford K.H., Stack K.M., Bhartia R., Chen A., de la Torre M., Hand K., Goreva Y., Herd C.D., Hueso R., et al. Mars 2020 Mission Overview. Space Sci. Rev. 2020;216:142. doi: 10.1007/s11214-020-00762-y. - DOI
-
- Rodriguez-Manfredi J.A., de la Torre Juárez M., Alonso A., Apéstigue V., Arruego I., Atienza T., Banfield D., Boland J., Carrera M.A., Castañer L., et al. The Mars Environmental Dynamics Analyzer, MEDA. A Suite of Environmental Sensors for the Mars 2020 Mission. Space Sci. Rev. 2021;217:48. doi: 10.1007/s11214-021-00816-9. - DOI - PMC - PubMed
-
- Gómez-Elvira J., Armiens C., Castañer L., Domínguez M., Genzer M., Gómez F., Haberle R., Harri A.-M., Jiménez V., Kahanpää H., et al. REMS: The Environmental Sensor Suite for the Mars Science Laboratory Rover. Space Sci. Rev. 2012;170:583–640. doi: 10.1007/s11214-012-9921-1. - DOI
-
- Banfield D., Rodriguez-Manfredi J.A., Russell C.T., Rowe K.M., Leneman D., Lai H.R., Cruce P.R., Means J.D., Johnson C.L., Mittelholz A., et al. InSight Auxiliary Payload Sensor Suite (APSS) Space Sci. Rev. 2019;215:4. doi: 10.1007/s11214-018-0570-x. - DOI
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
Miscellaneous
