

Soft actuators for real-world applications
- PMID: 35474944
- PMCID: PMC7612659
- DOI: 10.1038/s41578-021-00389-7
Soft actuators for real-world applications
Abstract
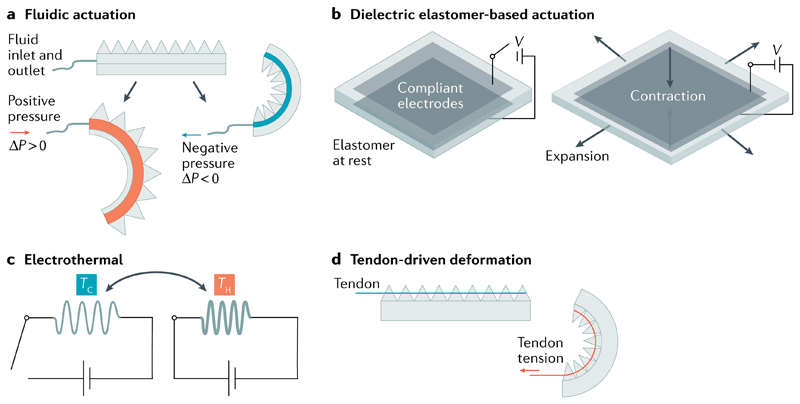
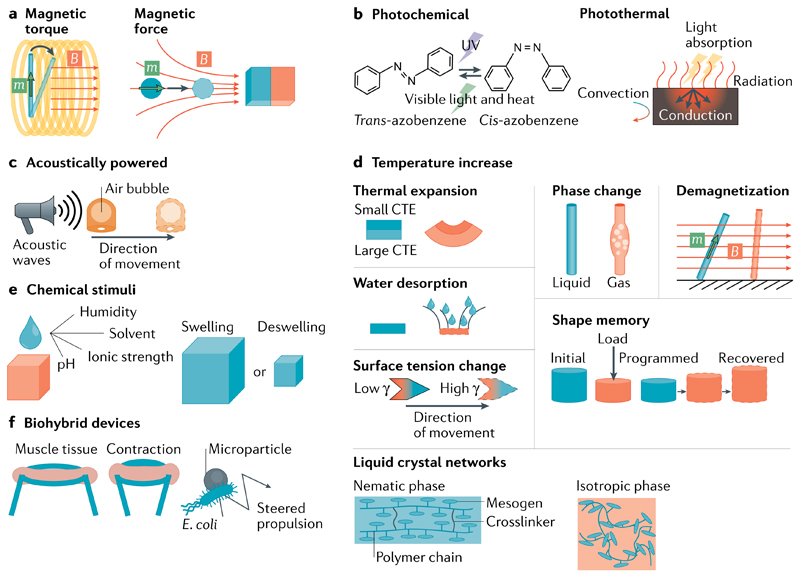
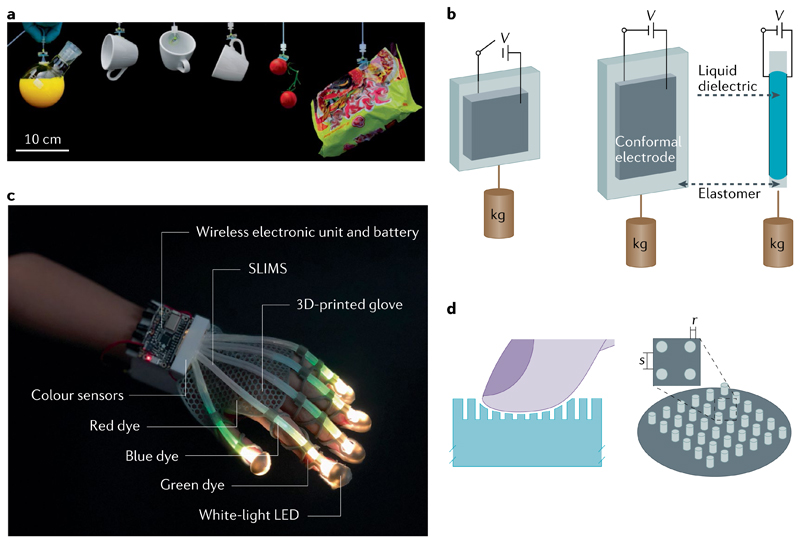
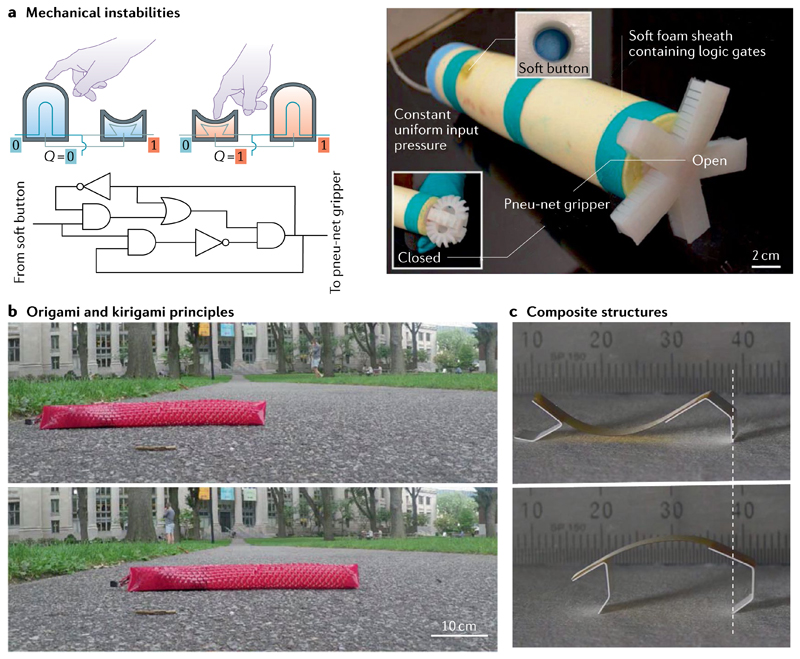
Inspired by physically adaptive, agile, reconfigurable and multifunctional soft-bodied animals and human muscles, soft actuators have been developed for a variety of applications, including soft grippers, artificial muscles, wearables, haptic devices and medical devices. However, the complex performance of biological systems cannot yet be fully replicated in synthetic designs. In this Review, we discuss new materials and structural designs for the engineering of soft actuators with physical intelligence and advanced properties, such as adaptability, multimodal locomotion, self-healing and multi-responsiveness. We examine how performance can be improved and multifunctionality implemented by using programmable soft materials, and highlight important real-world applications of soft actuators. Finally, we discuss the challenges and opportunities for next-generation soft actuators, including physical intelligence, adaptability, manufacturing scalability and reproducibility, extended lifetime and end-of-life strategies.
Conflict of interest statement
Competing interests The authors declare no competing interests.
Figures

References
-
- Madden JDW, et al. Artificial muscle technology: principles and naval prospects. IEEE J Ocean Eng. 2004;29:706–728.
-
- Mirvakili SM, Hunter IW. Artificial muscles: mechanisms, applications, and challenges. Adv Mater. 2018;30:1704407 - PubMed
-
- Rich SI, Wood RJ, Majidi C. Untethered soft robotics. Nat Electron. 2018;1:102–112.
-
- Cianchetti M, Laschi C, Menciassi A, Dario P. Biomedical applications of soft robotics. Nat Rev Mater. 2018;3:143–153.
-
- Shintake J, Rosset S, Schubert B, Floreano D, Shea H. Versatile soft grippers with intrinsic electroadhesion based on multifunctional polymer actuators. Adv Mater. 2016;28:231–238. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources