

Physical intelligence as a new paradigm
- PMID: 35475112
- PMCID: PMC7612657
Physical intelligence as a new paradigm
Abstract
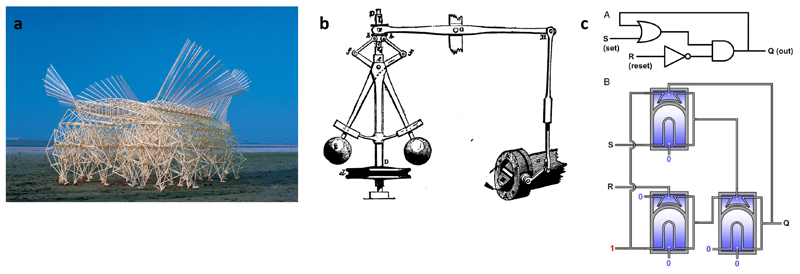
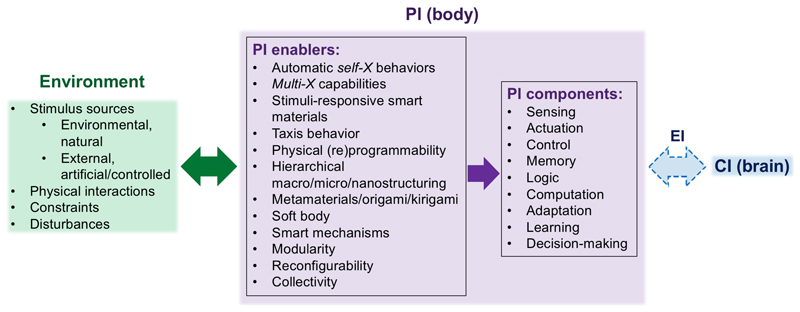
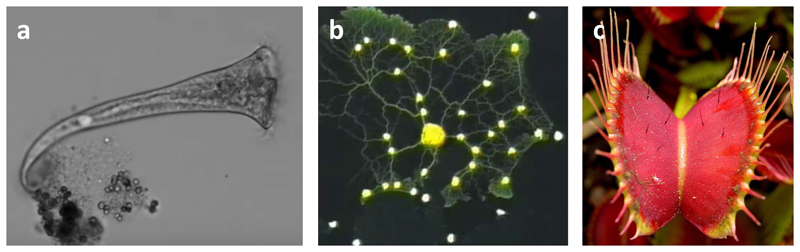
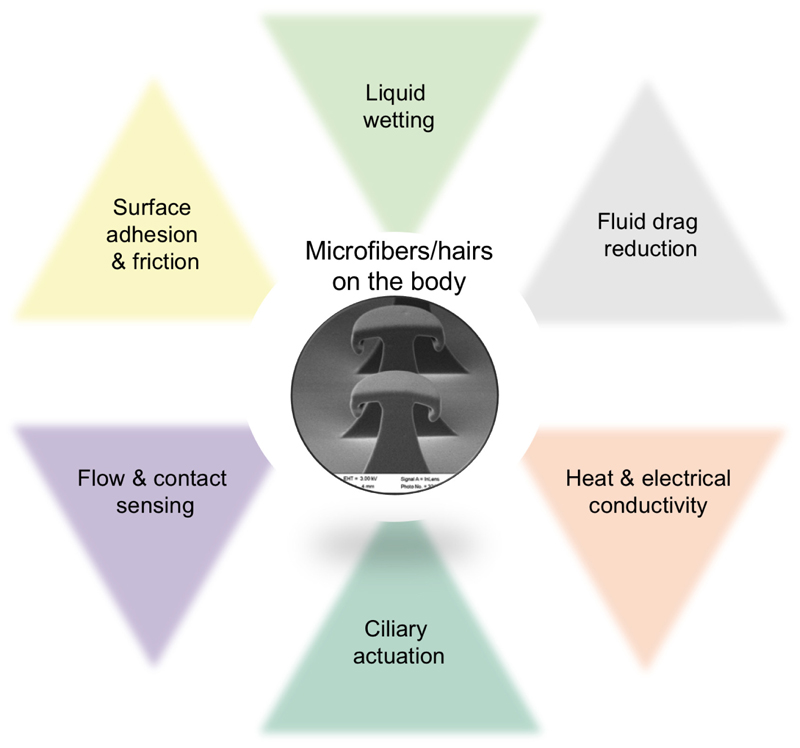
Intelligence of physical agents, such as human-made (e.g., robots, autonomous cars) and biological (e.g., animals, plants) ones, is not only enabled by their computational intelligence (CI) in their brain, but also by their physical intelligence (PI) encoded in their body. Therefore, it is essential to advance the PI of human-made agents as much as possible, in addition to their CI, to operate them in unstructured and complex real-world environments like the biological agents. This article gives a perspective on what PI paradigm is, when PI can be more significant and dominant in physical and biological agents at different length scales and how bioinspired and abstract PI methods can be created in agent bodies. PI paradigm aims to synergize and merge many research fields, such as mechanics, materials science, robotics, mechanical design, fluidics, active matter, biology, self-assembly and collective systems, to enable advanced PI capabilities in human-made agent bodies, comparable to the ones observed in biological organisms. Such capabilities would progress the future robots and other machines beyond what can be realized using the current frameworks.
Keywords: Physical Intelligence; mechanical computation; mechanical memory; mechanics; meta materials; multistability.
Conflict of interest statement
Declaration of competing interest The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Figures
References
-
- Floreano D, Mattiussi C. Bio-Inspired Artificial Intelligence: Theories, Methods, and Technologies. MIT Press; 2008.
-
- Engelbrecht AP. Computational Intelligence: An Introduction. John Wiley & Sons; 2007.
-
- Hochner B. Octopuses. Curr Biol. 2008;18(19):R897–R898. - PubMed
-
- Pfeifer R, Bongard J. How the Body Shapes the Way We Think: A New View of Intelligence. MIT Press; 2006.
-
- Barrett L. Beyond the Brain: How Body and Environment Shape Animal and Human Minds. Princeton University Press; 2011.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
Miscellaneous