

Robotic upright stand trainer (RobUST) and postural control in individuals with spinal cord injury
- PMID: 35532324
- PMCID: PMC10653750
- DOI: 10.1080/10790268.2022.2069532
Robotic upright stand trainer (RobUST) and postural control in individuals with spinal cord injury
Abstract
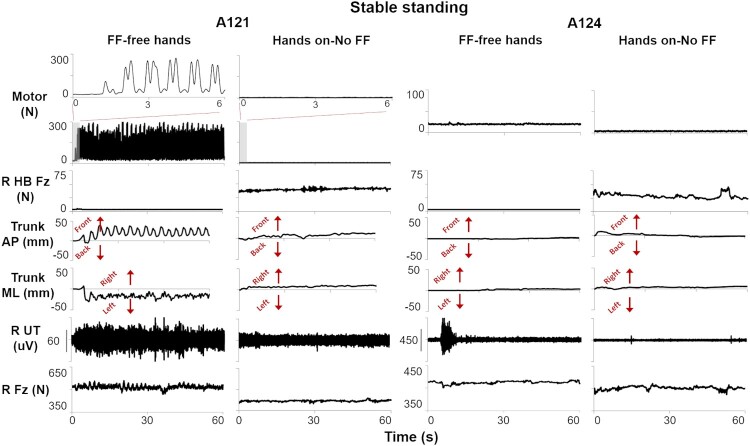
Context/objective: Assessed feasibility and potential effectiveness of using a novel robotic upright stand trainer (RobUST) to deliver postural perturbations or provide assistance-as-needed at the trunk while individuals with spinal cord injury (SCI) performed stable standing and self-initiated trunk movements. These tasks were assessed with research participants' hands on handlebars for self-balance assistance (hands on) and with hands off (free hands).
Design: Proof of concept study.
Participants: Four individuals with motor complete (n = 3) or incomplete (n = 1) SCI who were not able to achieve independent standing and presented a neurological lesion level ranging from cervical 4 to thoracic 2.
Outcome measures: Ground reaction forces, trunk displacement, and electromyography activity of trunk and lower limb muscles.
Results: Research participants received continuous pelvic assistance via RobUST, and manual trainer assistance at the knees to maintain standing. Participants were able to attempt all tasks. Free hands trunk perturbations resulted in greater load bearing-related sensory information (73% ipsilateral vertical loading), trunk displacement (57%), and muscle activation compared to hands on. Similarly, free hands stable standing with RobUST assistance-as-needed resulted in 8.5% larger bodyweight bearing, 112% larger trunk movement velocity, and higher trunk muscles activation compared to standing with hands on. Self-initiated trunk movements controlled by hands on showed 116% greater trunk displacement, 10% greater vertical ground reaction force, and greater ankle muscle activation compared to free hands.
Conclusion: RobUST established a safe and challenging standing environment for individuals with SCI and has the potential to improve training paradigms and assessments of standing postural control.
Keywords: Force field; Perturbation; Postural control; Robotics; Spinal cord injury; Standing.
Conflict of interest statement
Figures





References
-
- Horak F, Macpherson J.. Postural orientation and equilibrium. In: S J, R L, (eds.) Handbook of physiology. New York: Oxford University Press; 1996. p. 255–292.
-
- Macpherson J, Deliagina T, Orlovsky G.. Control of body orientation and equilibrium in vertebrates. In: Stein P, Grillner S, Selverston A, Stuart D, (eds.) Neurons, networks and motor behavior. Cambridge, MA: MIT Press; 1997. p. 257–267.
-
- Orlovsky T, Orlovskiĭ GN, Deliagina T, Grillner S.. Neuronal control of locomotion: from mollusc to man. Oxford: Oxford University Press; 1999.
-
- Massion J, Dufosse M.. Coordination between posture and movement: why and how? Physiology 1988;3(3):88–93.
-
- Edgerton VR, Tillakaratne NJK, Bigbee AJ, de Leon RD, Roy RR.. Plasticity of the spinal neural circuitry after injury. Annu Rev Neurosci 2004;27:145–167. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical