

Navigable Space and Traversable Edges Differentially Influence Reorientation in Sighted and Blind Mice
- PMID: 35536866
- PMCID: PMC9343889
- DOI: 10.1177/09567976211055373
Navigable Space and Traversable Edges Differentially Influence Reorientation in Sighted and Blind Mice
Abstract
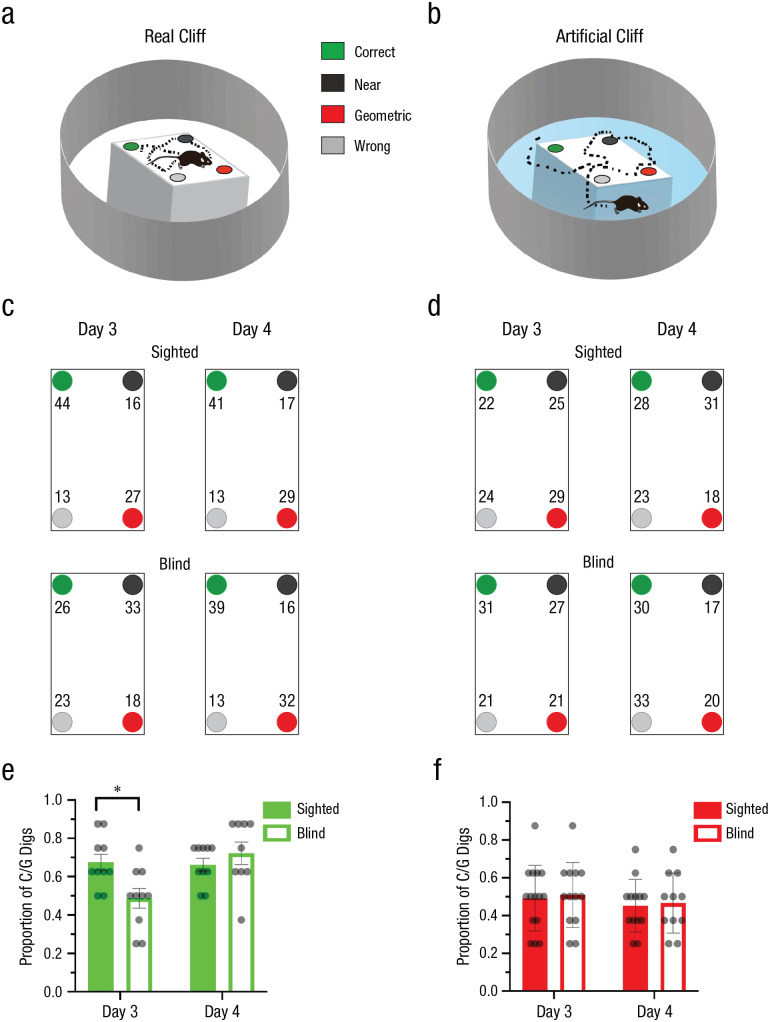
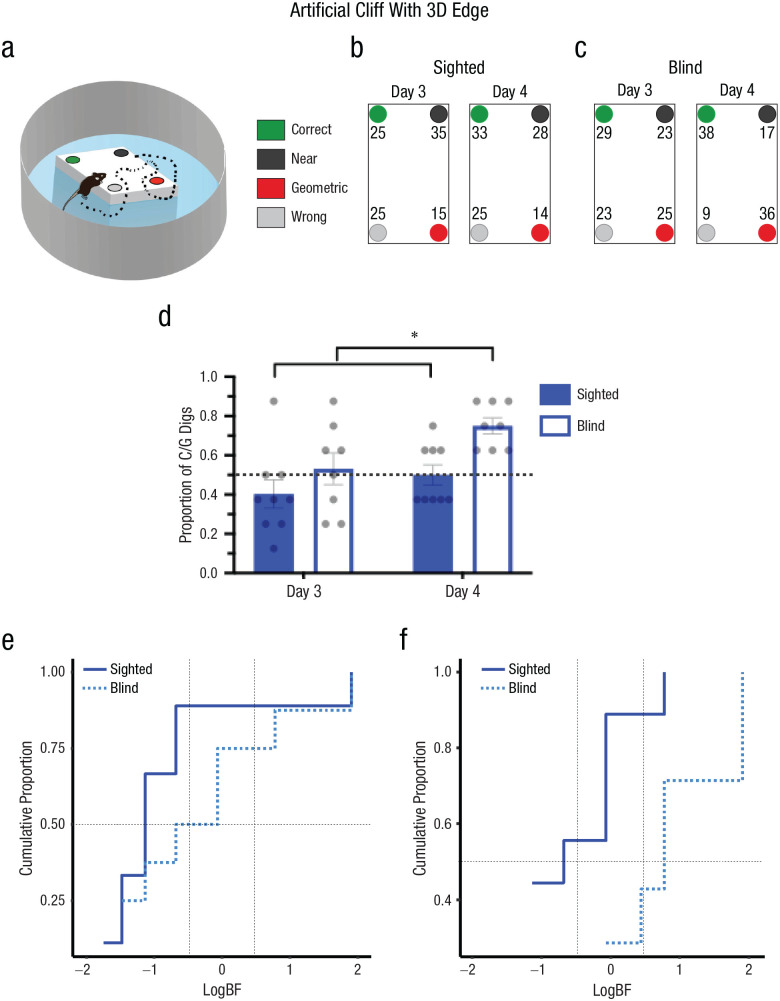
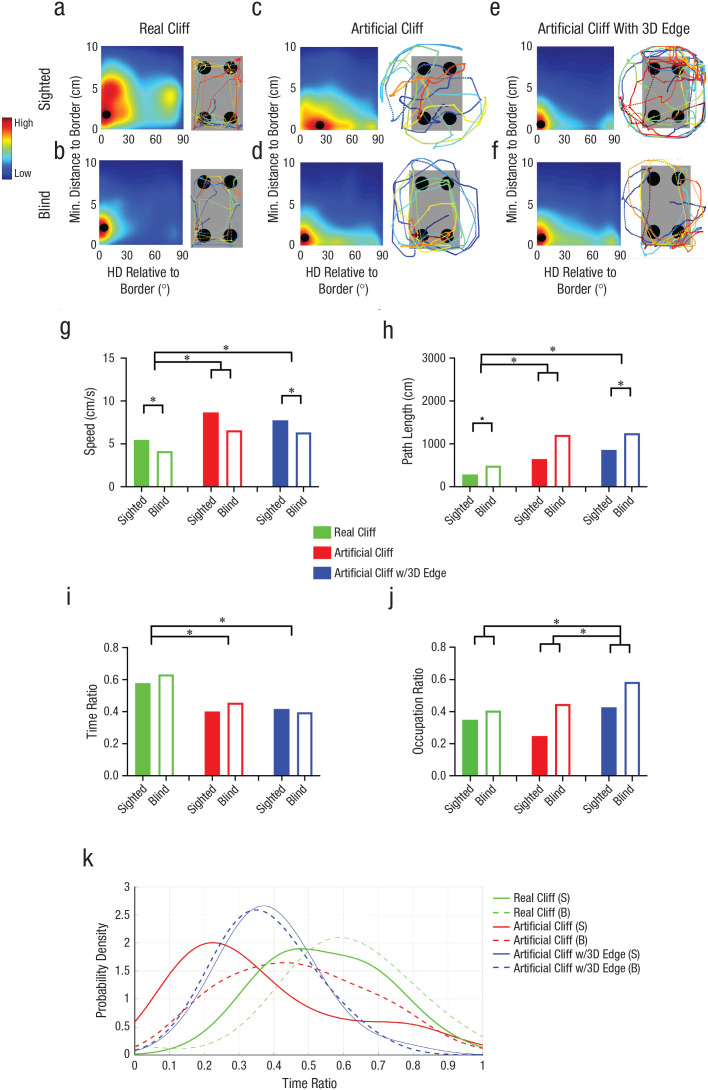
Reorientation enables navigators to regain their bearings after becoming lost. Disoriented individuals primarily reorient themselves using the geometry of a layout, even when other informative cues, such as landmarks, are present. Yet the specific strategies that animals use to determine geometry are unclear. Moreover, because vision allows subjects to rapidly form precise representations of objects and background, it is unknown whether it has a deterministic role in the use of geometry. In this study, we tested sighted and congenitally blind mice (Ns = 8-11) in various settings in which global shape parameters were manipulated. Results indicated that the navigational affordances of the context-the traversable space-promote sampling of boundaries, which determines the effective use of geometric strategies in both sighted and blind mice. However, blind animals can also effectively reorient themselves using 3D edges by extensively patrolling the borders, even when the traversable space is not limited by these boundaries.
Keywords: blindness; geometric strategy; reorientation; spatial learning; spatial navigation.
Conflict of interest statement
Figures
References
-
- Bleckmann H., Zelick R. (2009). Lateral line system of fish. Integrative Zoology, 4(1), 13–25. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
