

Dexterous Manipulation for Multi-Fingered Robotic Hands With Reinforcement Learning: A Review
- PMID: 35548780
- PMCID: PMC9083362
- DOI: 10.3389/fnbot.2022.861825
Dexterous Manipulation for Multi-Fingered Robotic Hands With Reinforcement Learning: A Review
Abstract
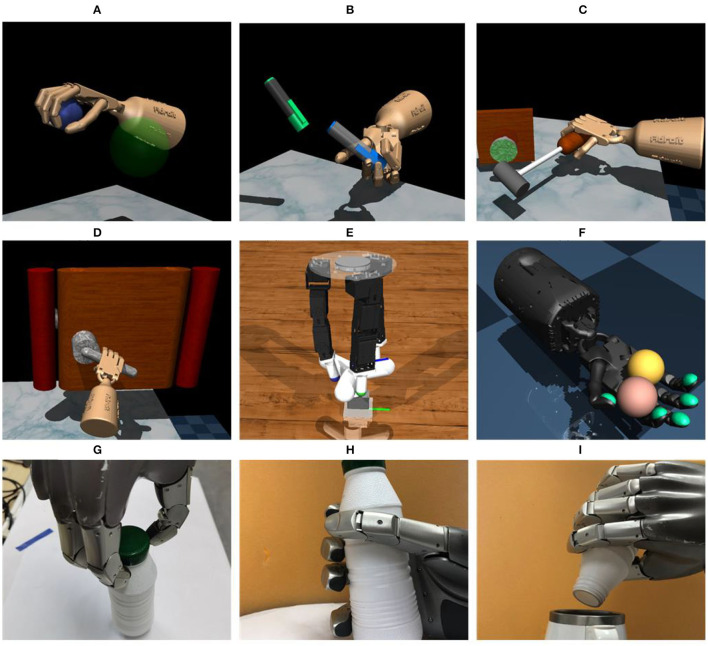
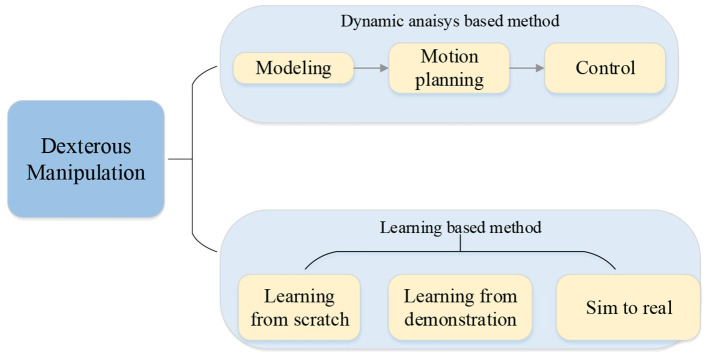
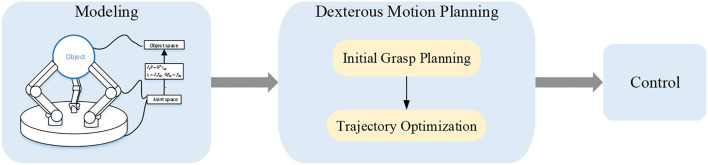
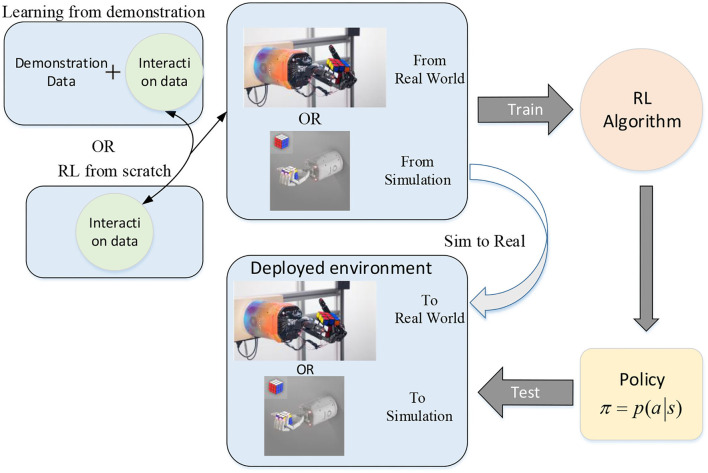
With the increasing demand for the dexterity of robotic operation, dexterous manipulation of multi-fingered robotic hands with reinforcement learning is an interesting subject in the field of robotics research. Our purpose is to present a comprehensive review of the techniques for dexterous manipulation with multi-fingered robotic hands, such as the model-based approach without learning in early years, and the latest research and methodologies focused on the method based on reinforcement learning and its variations. This work attempts to summarize the evolution and the state of the art in this field and provide a summary of the current challenges and future directions in a way that allows future researchers to understand this field.
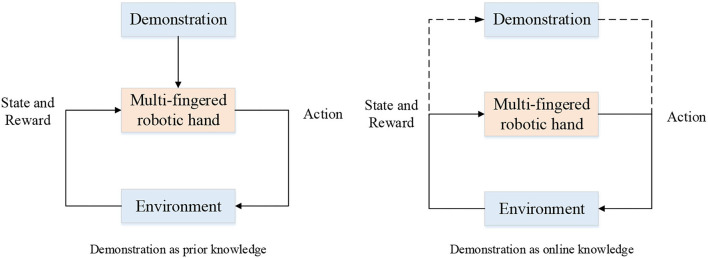
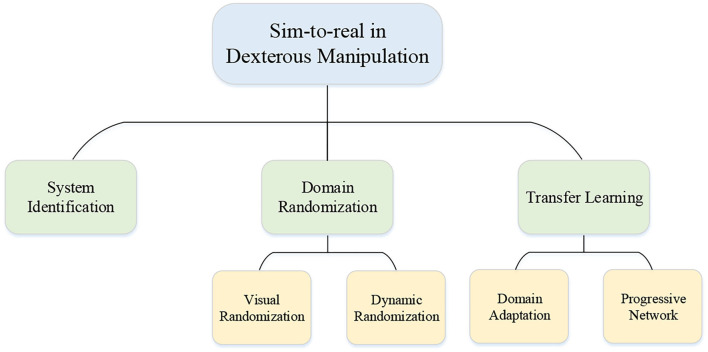
Keywords: dexterous manipulation; learn from demonstration; multi-fingered robotic hand; reinforcement learning; sim2real.
Copyright © 2022 Yu and Wang.
Conflict of interest statement
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Figures

Similar articles
-
Bridging Locomotion and Manipulation Using Reconfigurable Robotic Limbs via Reinforcement Learning.Biomimetics (Basel). 2023 Aug 14;8(4):364. doi: 10.3390/biomimetics8040364. Biomimetics (Basel). 2023. PMID: 37622969 Free PMC article.
-
An Accessible, Open-Source Dexterity Test: Evaluating the Grasping and Dexterous Manipulation Capabilities of Humans and Robots.Front Robot AI. 2022 Apr 25;9:808154. doi: 10.3389/frobt.2022.808154. eCollection 2022. Front Robot AI. 2022. PMID: 35546901 Free PMC article.
-
Complex manipulation with a simple robotic hand through contact breaking and caging.Sci Robot. 2021 May 12;6(54):eabd2666. doi: 10.1126/scirobotics.abd2666. Sci Robot. 2021. PMID: 34043534
-
Review of Learning-Based Robotic Manipulation in Cluttered Environments.Sensors (Basel). 2022 Oct 18;22(20):7938. doi: 10.3390/s22207938. Sensors (Basel). 2022. PMID: 36298284 Free PMC article. Review.
-
A Survey of Multifingered Robotic Manipulation: Biological Results, Structural Evolvements, and Learning Methods.Front Neurorobot. 2022 Apr 27;16:843267. doi: 10.3389/fnbot.2022.843267. eCollection 2022. Front Neurorobot. 2022. PMID: 35574228 Free PMC article. Review.
Cited by
-
Reinforcement Learning Algorithms and Applications in Healthcare and Robotics: A Comprehensive and Systematic Review.Sensors (Basel). 2024 Apr 11;24(8):2461. doi: 10.3390/s24082461. Sensors (Basel). 2024. PMID: 38676080 Free PMC article.
References
-
- Alakuijala M., Dulac-Arnold G., Mairal J., Ponce J., Schmid C. (2021). Residual reinforcement learning from demonstrations. ArXiv210608050 Cs.
-
- Al-Gallaf E., Warwick K. (1995). Force distribution in manipulation by a robot hand with equality and inequality constraints. Mechatronics. 5, 561–583. 10.1016/0957-4158(95)00017-Y - DOI
-
- Allegro hand . Allegro hand, Available online at: https://github.com/simlabrobotics/allegro_hand_ros
-
- Allshire A., Mittal M., Lodaya V., Makoviychuk V., Makoviichuk D., Widmaier F., et al. . (2021). Transferring dexterous manipulation from GPU simulation to a remote real-world trifinger. ArXiv210809779 Cs.
-
- Anderson R. J., Spong M. W. (1988). Hybrid impedance control of robotic manipulators. IEEE J. Robot. Autom. 4, 549–556. 10.1109/56.20440 - DOI
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources