

Normal and tangential forces combine to convey contact pressure during dynamic tactile stimulation
- PMID: 35581308
- PMCID: PMC9114425
- DOI: 10.1038/s41598-022-12010-0
Normal and tangential forces combine to convey contact pressure during dynamic tactile stimulation
Abstract
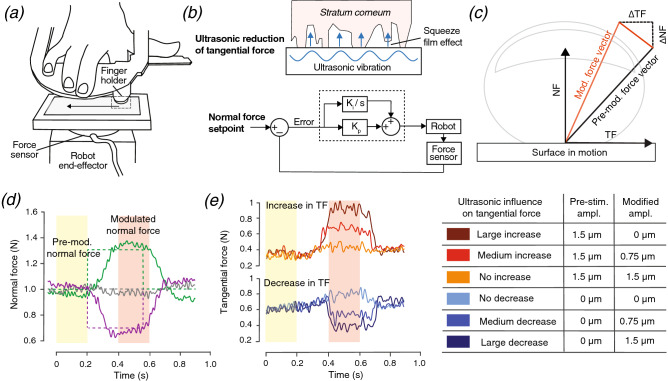
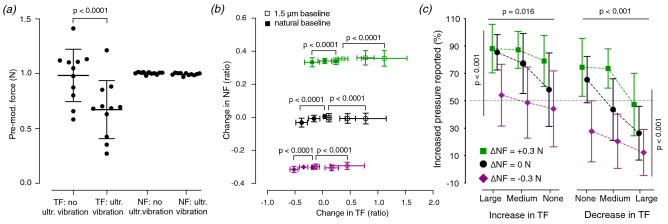
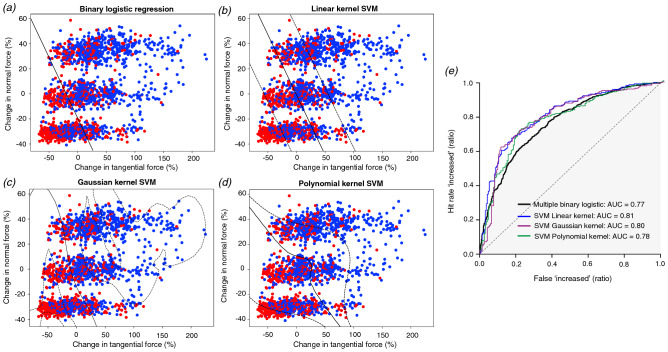
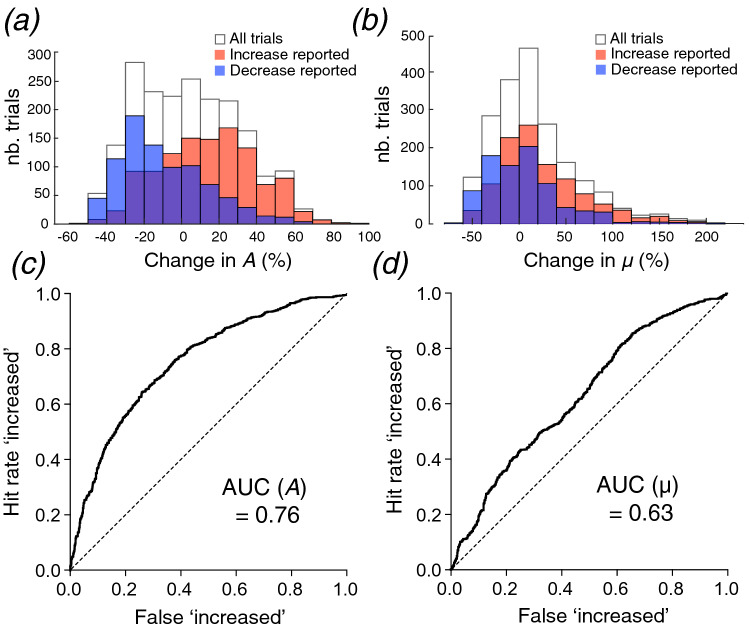
Humans need to accurately process the contact forces that arise as they perform everyday haptic interactions such as sliding the fingers along a surface to feel for bumps, sticky regions, or other irregularities. Several different mechanisms are possible for how the forces on the skin could be represented and integrated in such interactions. In this study, we used a force-controlled robotic platform and simultaneous ultrasonic modulation of the finger-surface friction to independently manipulate the normal and tangential forces during passive haptic stimulation by a flat surface. To assess whether the contact pressure on their finger had briefly increased or decreased during individual trials in this broad stimulus set, participants did not rely solely on either the normal force or the tangential force. Instead, they integrated tactile cues induced by both components. Support-vector-machine analysis classified physical trial data with up to 75% accuracy and suggested a linear perceptual mechanism. In addition, the change in the amplitude of the force vector predicted participants' responses better than the change of the coefficient of dynamic friction, suggesting that intensive tactile cues are meaningful in this task. These results provide novel insights about how normal and tangential forces shape the perception of tactile contact.
© 2022. The Author(s).
Conflict of interest statement
The authors declare no competing interests.
Figures

References
-
- Robles-De-La-Torre G. The Importance of the sense of touch in virtual and real environments. IEEE Multimed. 2006;13(3):24–30. doi: 10.1109/MMUL.2006.69. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
