

Automation of Controlled/Living Radical Polymerization
- PMID: 35586369
- PMCID: PMC9113399
- DOI: 10.1002/aisy.201900126
Automation of Controlled/Living Radical Polymerization
Abstract
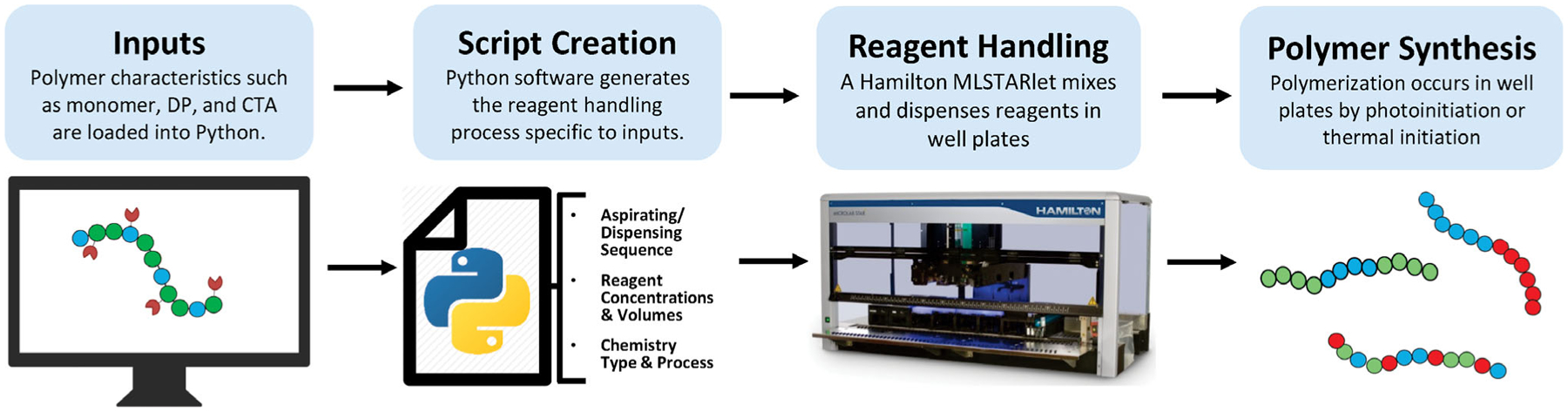
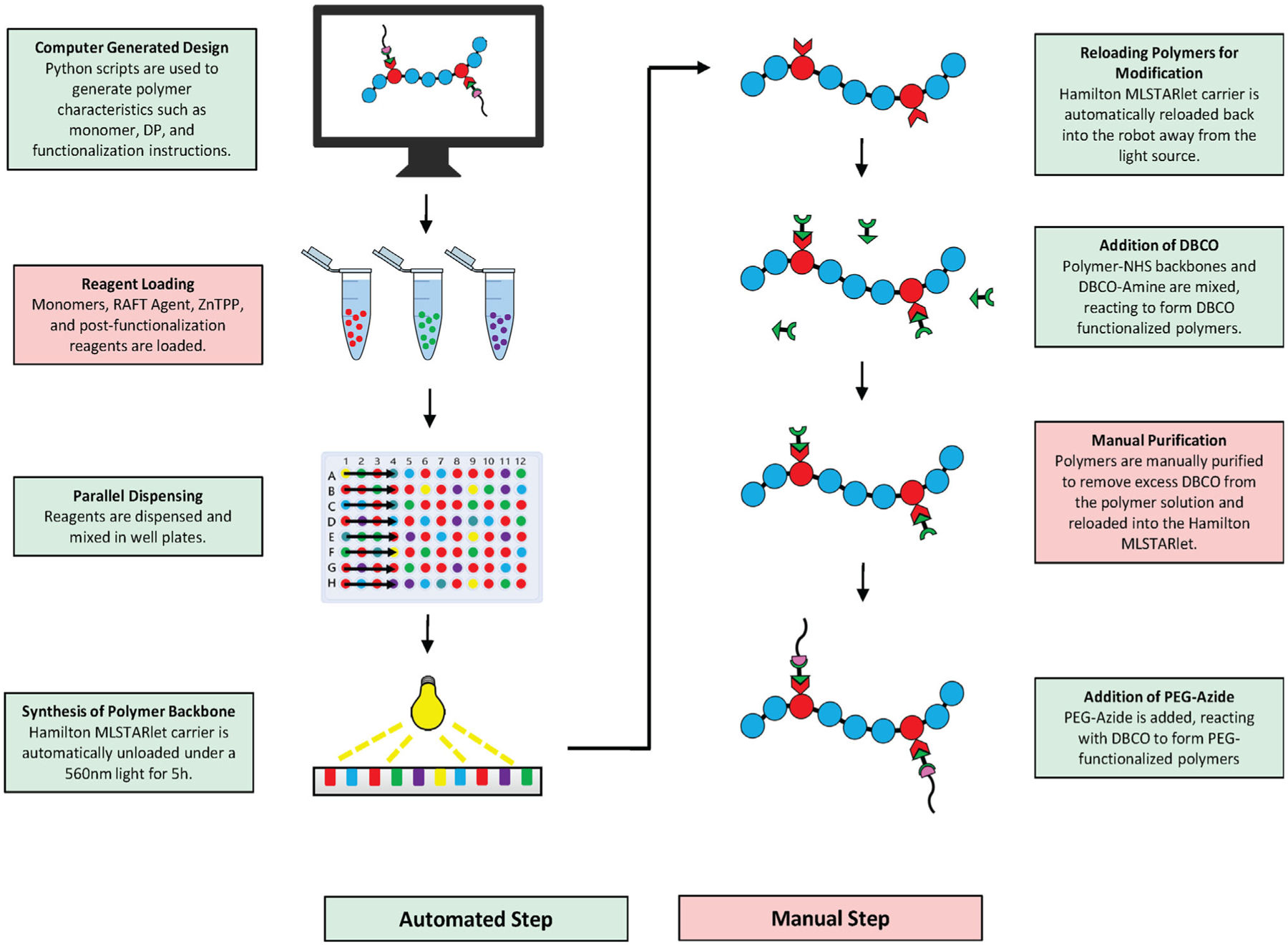
Controlled/living radical polymerization (CLRP) techniques are widely utilized to synthesize advanced and controlled synthetic polymers for chemical and biological applications. While automation has long stood as a high-throughput (HTP) research tool to increase productivity as well as synthetic/analytical reliability and precision, oxygen intolerance of CLRP has limited the widespread adoption of these systems. Recently, however, oxygen-tolerant CLRP techniques, such as oxygen-tolerant photoinduced electron/energy transfer-reversible addition-fragmentation chain transfer (PET-RAFT), enzyme degassing of RAFT (Enz-RAFT), and atom-transfer radical polymerization (ATRP), have emerged. Herein, the use of a Hamilton MLSTARlet liquid handling robot for automating CLRP reactions is demonstrated. Synthesis processes are developed using Python and used to automate reagent handling, dispensing sequences, and synthesis steps required to create homopolymers, random heteropolymers, and block copolymers in 96-well plates, as well as postpolymerization modifications. Using this approach, the synergy between highly customizable liquid handling robotics and oxygen-tolerant CLRP to automate advanced polymer synthesis for HTP and combinatorial polymer research is demonstrated.
Keywords: automation; high throughput; oxygen tolerant; polymers; reversible addition–fragmentation chain transfer.
Conflict of interest statement
Conflict of Interest The authors declare no conflict of interest.
Figures
References
-
- Chapman T, Nature 2003, 421, 661. - PubMed
-
- Stephen Brocchini KJ, Tangpasuthadol V, Kohn J, J. Am. Chem. Soc 1997, 119, 4553;
- Hoogenboom R, Meier Michael AR, Schubert Ulrich S, Macromol. Rapid Commun 2003, 24, 15.
-
- Guerrero-Sanchez C, Paulus RM, Fijten MWM, de la Mar MJ, Hoogenboom R, Schubert US, Appl. Surf. Sci 2006, 252, 2555;
- Hoogenboom R, Schubert US, Rev. Sci. Instrum 2005, 76, 062202;
- Schmatloch S, Meier MAR, Schubert US, Macromol. Rapid Commun 2003, 24, 33;
- Zhang H, Richard H, Meier M, Schubert US, Meas. Sci. Technol 2005, 16, 203.
-
- Becer CR, Paulus Renzo M, Hoogenboom R, Schubert Ulrich S, J. Polym. Sci. Part A Polym. Chem 2006, 44, 6202;
- Chan-Seng D, Zamfir M, Lutz J-F, Angew. Chem. Int. Ed 2012, 51, 12254; - PubMed
- Fournier D, Hoogenboom R, Thijs HML, Paulus RM, Schubert US, Macromolecules 2007, 40, 915;
- Guerrero-Sanchez C, Harrisson S, Keddie DJ, Macromol. Symp 2013, 325–326, 38;
- Renzo MP, Martin WMF, de la Mar. Mariska J, Hoogenboom R, Ulrich SS, QSAR Combinatorial Sci 2005, 24, 863;
- Zhang H, Fijten Martin WM, Hoogenboom R, Reinierkens R, Schubert Ulrich S, Macromol. Rapid Commun 2003, 24, 81.
-
- Bosman AW, Heumann A, Klaerner G, Benoit D, Fréchet JMJ, Hawker CJ, J. Am. Chem. Soc 2001, 123, 6461. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources