

Event-Based Motion Capture System for Online Multi-Quadrotor Localization and Tracking
- PMID: 35590931
- PMCID: PMC9100634
- DOI: 10.3390/s22093240
Event-Based Motion Capture System for Online Multi-Quadrotor Localization and Tracking
Abstract
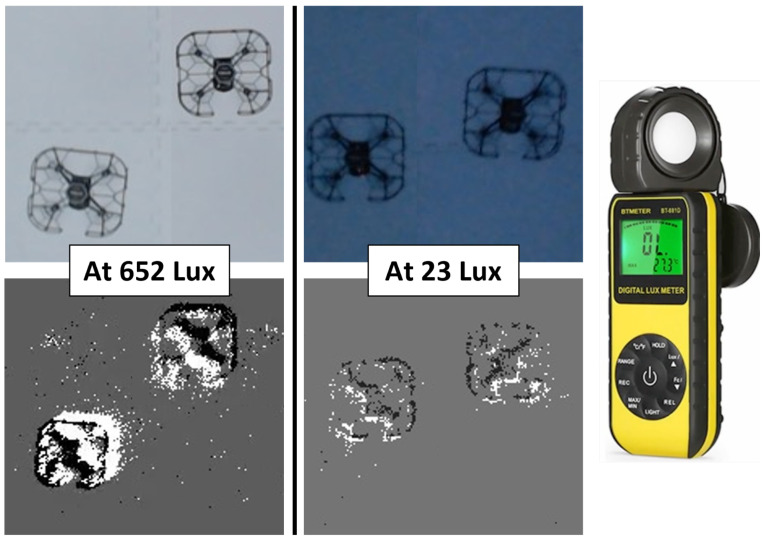
Motion capture systems are crucial in developing multi-quadrotor systems due to their ability to provide fast and accurate ground truth measurements for tracking and control. This paper presents the implementation details and experimental validation of a relatively low-cost motion-capture system for multi-quadrotor motion planning using an event camera. The real-time, multi-quadrotor detection and tracking tasks are performed using a deep learning network You-Only-Look-Once (YOLOv5) and a k-dimensional (k-d) tree, respectively. An optimization-based decentralized motion planning algorithm is implemented to demonstrate the effectiveness of this motion capture system. Extensive experimental evaluations were performed to (1) compare the performance of four deep-learning algorithms for high-speed multi-quadrotor detection on event-based data, (2) study precision, recall, and F1 scores as functions of lighting conditions and camera motion, and (3) investigate the scalability of this system as a function of the number of quadrotors flying in the arena. Comparative analysis of the deep learning algorithms on a consumer-grade GPU demonstrates a 4.8× to 12× sampling/inference rate advantage that YOLOv5 provides over representative one- and two-stage detectors and a 1.14× advantage over YOLOv4. In terms of precision and recall, YOLOv5 performed 15% to 18% and 27% to 41% better than representative state-of-the-art deep learning networks. Graceful detection and tracking performance degradation was observed in the face of progressively darker ambient light conditions. Despite severe camera motion, YOLOv5 precision and recall values of 94% and 98% were achieved, respectively. Finally, experiments involving up to six indoor quadrotors demonstrated the scalability of this approach. This paper also presents the first open-source event camera dataset in the literature, featuring over 10,000 fully annotated images of multiple quadrotors operating in indoor and outdoor environments.
Keywords: YOLO; datasets for robotic vision; event-based cameras; k-d tree; motion capture systems; motion coordination; motion planning; multi-quadrotor systems; neural network; object detection; pose estimation.
Conflict of interest statement
The authors declare no conflict of interest.
Figures











Similar articles
-
MBT3D: Deep learning based multi-object tracker for bumblebee 3D flight path estimation.PLoS One. 2023 Sep 22;18(9):e0291415. doi: 10.1371/journal.pone.0291415. eCollection 2023. PLoS One. 2023. PMID: 37738269 Free PMC article.
-
QuadNet: A Hybrid Framework for Quadrotor Dead Reckoning.Sensors (Basel). 2022 Feb 13;22(4):1426. doi: 10.3390/s22041426. Sensors (Basel). 2022. PMID: 35214328 Free PMC article.
-
Recognition and Counting of Apples in a Dynamic State Using a 3D Camera and Deep Learning Algorithms for Robotic Harvesting Systems.Sensors (Basel). 2023 Apr 7;23(8):3810. doi: 10.3390/s23083810. Sensors (Basel). 2023. PMID: 37112151 Free PMC article.
-
Invariant Set Distributed Explicit Reference Governors for Provably Safe On-Board Control of Nano-Quadrotor Swarms.Front Robot AI. 2021 Jun 22;8:663809. doi: 10.3389/frobt.2021.663809. eCollection 2021. Front Robot AI. 2021. PMID: 34239901 Free PMC article. Review.
-
Multi-Object Multi-Camera Tracking Based on Deep Learning for Intelligent Transportation: A Review.Sensors (Basel). 2023 Apr 10;23(8):3852. doi: 10.3390/s23083852. Sensors (Basel). 2023. PMID: 37112193 Free PMC article. Review.
Cited by
-
Influence of simulated traffic on foundation pit deformation via machine vision technology.Sci Rep. 2025 Jul 1;15(1):21242. doi: 10.1038/s41598-025-05699-2. Sci Rep. 2025. PMID: 40594470 Free PMC article.
-
Sensor-Fusion Based Navigation for Autonomous Mobile Robot.Sensors (Basel). 2025 Feb 18;25(4):1248. doi: 10.3390/s25041248. Sensors (Basel). 2025. PMID: 40006477 Free PMC article. Review.
-
A Spatial-Motion-Segmentation Algorithm by Fusing EDPA and Motion Compensation.Sensors (Basel). 2022 Sep 6;22(18):6732. doi: 10.3390/s22186732. Sensors (Basel). 2022. PMID: 36146090 Free PMC article.
-
Low-Complexity Lossless Coding of Asynchronous Event Sequences for Low-Power Chip Integration.Sensors (Basel). 2022 Dec 19;22(24):10014. doi: 10.3390/s222410014. Sensors (Basel). 2022. PMID: 36560383 Free PMC article.
References
-
- Abichandani P., Speck C., Bucci D., Mcintyre W., Lobo D. Implementation of Decentralized Reinforcement Learning-Based Multi-Quadrotor Flocking. IEEE Access. 2021;9:132491–132507. doi: 10.1109/ACCESS.2021.3115711. - DOI
-
- Fernando M., Liu L. Formation Control and Navigation of a Quadrotor Swarm; Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS); Atlanta, GA, USA. 11–14 June 2019; pp. 284–291. - DOI
-
- Schiano F., Franchi A., Zelazo D., Giordano P. A rigidity-based decentralized bearing formation controller for groups of quadrotor UAVs; Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS); Daejeon, Korea. 9–14 October 2016; pp. 5099–5106.
-
- VICON VICON Motion Capture System. [(accessed on 18 March 2022)]. Available online: https://www.vicon.com.
-
- Park J., Kim D., Kim G.C., Oh D., Kim H.J. Online Distributed Trajectory Planning for Quadrotor Swarm with Feasibility Guarantee using Linear Safe Corridor. arXiv. 2021 doi: 10.1109/LRA.2022.3152702.2109.09041 - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
