

Systematic analysis of volumetric ultrasound parameters for markerless 4D motion tracking
- PMID: 35597846
- PMCID: PMC9515030
- DOI: 10.1007/s11548-022-02665-5
Systematic analysis of volumetric ultrasound parameters for markerless 4D motion tracking
Abstract
Objectives: Motion compensation is an interesting approach to improve treatments of moving structures. For example, target motion can substantially affect dose delivery in radiation therapy, where methods to detect and mitigate the motion are widely used. Recent advances in fast, volumetric ultrasound have rekindled the interest in ultrasound for motion tracking. We present a setup to evaluate ultrasound based motion tracking and we study the effect of imaging rate and motion artifacts on its performance.
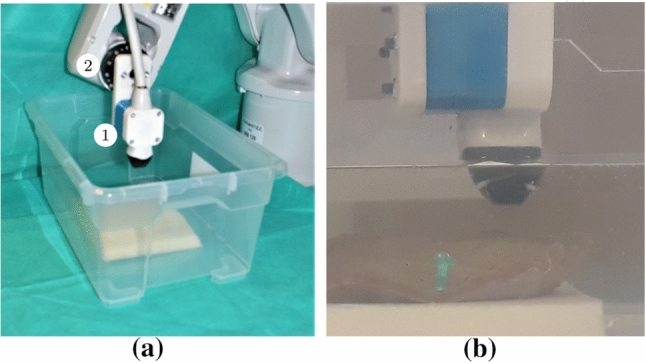
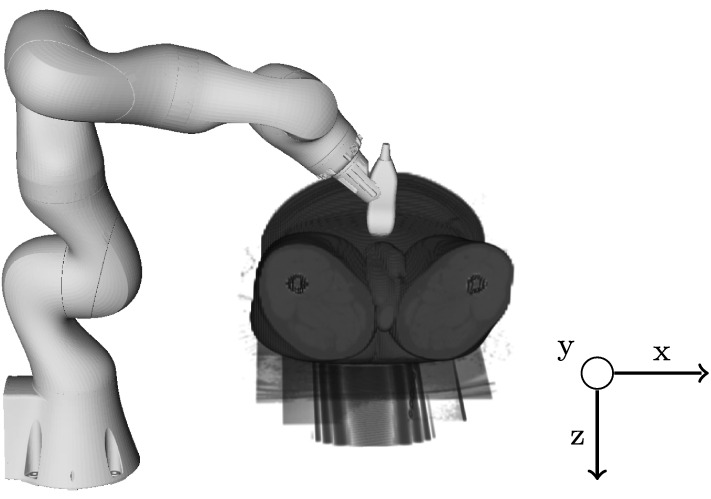
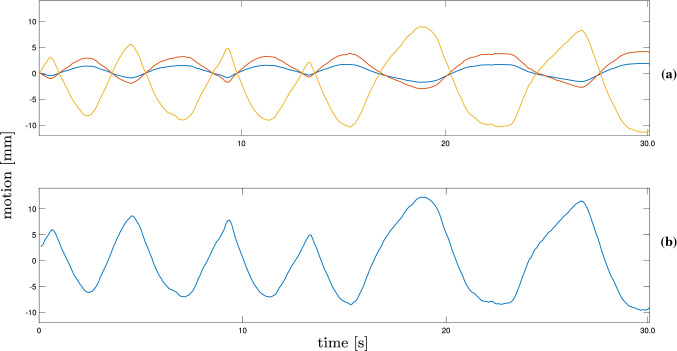
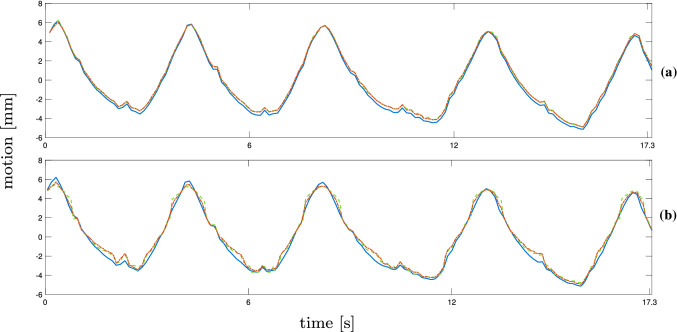
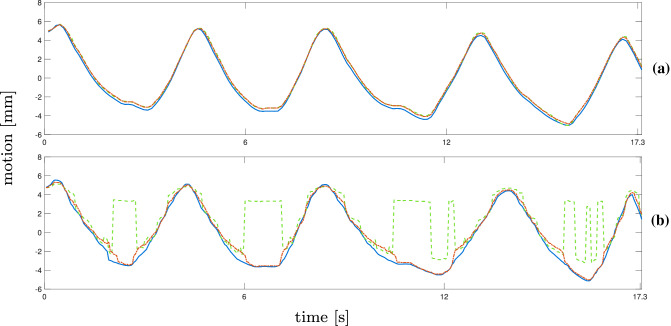
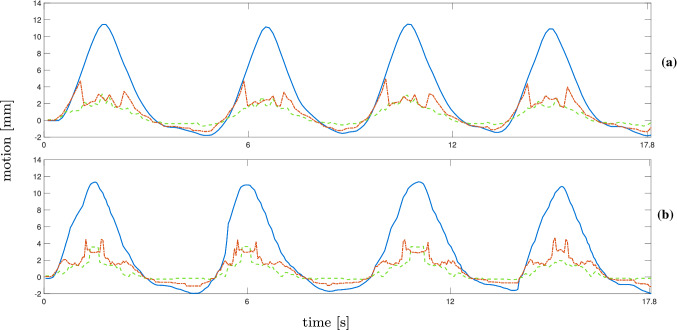
Methods: We describe an experimental setup to acquire markerless 4D ultrasound data with precise ground truth from a robot and evaluate different real-world trajectories and system settings toward accurate motion estimation. We analyze motion artifacts in continuously acquired data by comparing to data recorded in a step-and-shoot fashion. Furthermore, we investigate the trade-off between the imaging frequency and resolution.
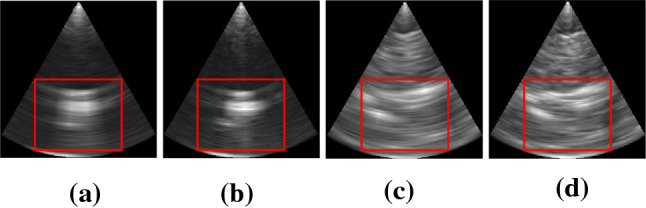
Results: The mean tracking errors show that continuously acquired data leads to similar results as data acquired in a step-and-shoot fashion. We report mean tracking errors up to 2.01 mm and 1.36 mm on the continuous data for the lower and higher resolution, respectively, while step-and-shoot data leads to mean tracking errors of 2.52 mm and 0.98 mm.
Conclusions: We perform a quantitative analysis of different system settings for motion tracking with 4D ultrasound. We can show that precise tracking is feasible and additional motion in continuously acquired data does not impair the tracking. Moreover, the analysis of the frequency resolution trade-off shows that a high imaging resolution is beneficial in ultrasound tracking.
Keywords: Image guidance; Motion estimation; Radiotherapy; Tracking; Ultrasound.
© 2022. The Author(s).
Conflict of interest statement
J. Sprenger, M. Bengs, S. Gerlach, M. Neidhardt and A. Schlaefer declare that they have no conflict of interest.
Figures
Similar articles
-
Online 4D ultrasound guidance for real-time motion compensation by MLC tracking.Med Phys. 2016 Oct;43(10):5695. doi: 10.1118/1.4962932. Med Phys. 2016. PMID: 27782689
-
Advances in 4D medical imaging and 4D radiation therapy.Technol Cancer Res Treat. 2008 Feb;7(1):67-81. doi: 10.1177/153303460800700109. Technol Cancer Res Treat. 2008. PMID: 18198927 Review.
-
Real-Time Motion Analysis With 4D Deep Learning for Ultrasound-Guided Radiotherapy.IEEE Trans Biomed Eng. 2023 Sep;70(9):2690-2699. doi: 10.1109/TBME.2023.3262422. Epub 2023 Aug 30. IEEE Trans Biomed Eng. 2023. PMID: 37030809
-
Motion tracking in the liver: validation of a method based on 4D ultrasound using a nonrigid registration technique.Med Phys. 2014 Aug;41(8):082903. doi: 10.1118/1.4890091. Med Phys. 2014. PMID: 25086560
-
Estimation of Large-Scale Organ Motion in B-Mode Ultrasound Image Sequences: A Survey.Ultrasound Med Biol. 2015 Dec;41(12):3044-62. doi: 10.1016/j.ultrasmedbio.2015.07.022. Epub 2015 Sep 7. Ultrasound Med Biol. 2015. PMID: 26360977 Review.
References
-
- Adler JR, Jr, Murphy MJ, Chang SD, Hancock SL. Image-guided robotic radiosurgery. Neurosurgery. 1999;44(6):1299–1306. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
