

Learning, fast and slow
- PMID: 35617751
- PMCID: PMC9509687
- DOI: 10.1016/j.conb.2022.102555
Learning, fast and slow
Abstract
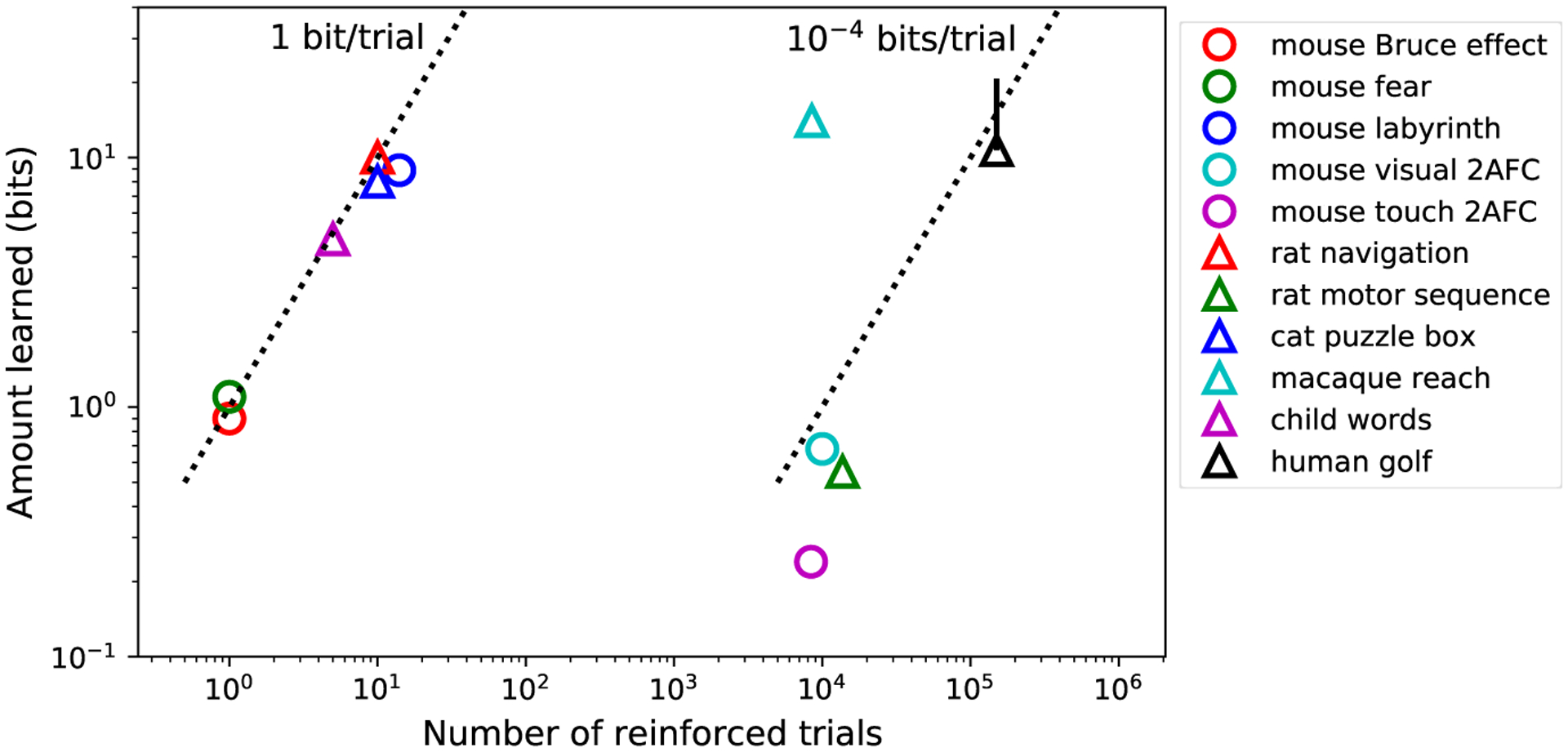
Animals can learn efficiently from a single experience and change their future behavior in response. However, in other instances, animals learn very slowly, requiring thousands of experiences. Here, I survey tasks involving fast and slow learning and consider some hypotheses for what differentiates the underlying neural mechanisms. It has been proposed that fast learning relies on neural representations that favor efficient Hebbian modification of synapses. These efficient representations may be encoded in the genome, resulting in a repertoire of fast learning that differs across species. Alternatively, the required neural representations may be acquired from experience through a slow process of unsupervised learning from the environment.
Copyright © 2022 Elsevier Ltd. All rights reserved.
Conflict of interest statement
Conflict of interest statement Nothing declared.
Figures



References
-
- Hick WE. On the rate of gain of information. The Quarterly Journal of Experimental Psychology, 4:11–26, 1952. ISSN 0033–555X. doi: 10.1080/17470215208416600. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
